SilhouetteMatch¶
Einführung¶
Das SilhouetteMatch-Modul ist ein optionales Modul, welches intern auf dem rc_visard läuft, und benötigt eine eigene Lizenz, welche erworben werden muss.
Das Modul erkennt Objekte, indem eine vordefinierte Silhouette („Template“) mit Kanten im Bild verglichen wird.
Templates können erstellt werden indem eine DXF Datei hochgeladen und die Objekthöhe angegeben wird. Die korrekte Skalierung und Einheit der Konturen wird aus der DXF Datei extrahiert. Falls die DXF Datei keine Einheit enthält, muss der Nutzer die korrekte Einheit angeben. Wenn die Außenkontur des Objects in der DXF Datei geschlossen ist, wird automatisch ein 3D Kollisionsmodell erstellt, indem die Kontur auf die Objekthöhe extrudiert wird. Dieses Modell wird dann zur Kollisionsprüfung und 3D-Visualisierung verwendet. Das Hochladen der DXF Datei kann in der Web GUI über guilabel:+ Neues Template erstellen im Abschnitt SilhouetteMatch Templates und Greifpunkte auf der oder Seite erfolgen.
Roboception bietet hierfür auch einen Template-Generierungsservice auf ihrer Website an, auf der der Benutzer CAD-Daten oder mit dem System aufgenommene Daten hochladen kann, um Templates generieren zu lassen.
Templates bestehen aus den prägnanten Kanten eines Objekts. Die Kanten des Templates werden mit den erkannten Kanten im linken und rechten Kamerabild abgeglichen, wobei die Größe der Objekte und deren Abstand zur Kamera mit einbezogen wird. Die Posen der erkannten Objekte werden zurückgegeben und können beispielsweise benutzt werden, um die Objekte zu greifen.
Das SilhouetteMatch-Modul bietet:
- eine intuitiv gestaltete Bedienoberfläche für Inbetriebnahme, Konfiguration und Test auf der rc_visard Web GUI
- eine REST-API-Schnittstelle und eine KUKA Ethernet KRL Schnittstelle
- die Möglichkeit, sogenannte Regions of Interest (ROIs) zu definieren, um relevante Teilbereiche des Kamerabilds auszuwählen (siehe Setzen einer Region of Interest)
- eine integrierte Load Carrier Erkennung (siehe LoadCarrier), um in Bin-Picking-Anwendungen („Griff in die Kiste“) Greifpunkte nur für Objekte in dem erkannten Load Carrier zu berechnen
- die Speicherung von bis zu 50 Templates
- die Definition von bis zu 50 Greifpunkten für jedes Template über eine interaktive Visualisierung in der Web GUI
- die Unterstützung von sowohl statisch montierten als auch robotergeführten Kameras. Optional kann es mit der Hand-Auge-Kalibrierung kombiniert werden, um Greifposen in einem benutzerdefinierten externen Koordinatensystem zu liefern
- Auswahl einer Strategie zum Sortieren der erkannten Objekte und zurückgelieferten Greifpunkte
- eine 3D Visualisierung des Detektionsergebnisses mit Greifpunkten und einer Greiferanimation in der Web GUI
Taugliche Objekte¶
Das SilhouetteMatch-Modul ist für Objekte ausgelegt, die prägnante Kanten auf einer Ebene besitzen, welche parallel zu der Basisebene ist, auf der die Objekte liegen. Das trifft beispielsweise auf flache, nicht-transparente Objekte zu, wie gefräste, lasergeschnittene oder wasserstrahlgeschnittene Teile. Komplexere Objekte können auch erkannt werden, solange sie prägnante Kanten auf einer Ebene besitzen, z.B. ein gedrucktes Muster auf einer ebenen Fläche.
Das SilhouetteMatch-Modul funktioniert am besten für Objekte, die auf einer texturlosen Basisebene liegen. Die Farbe der Basisebene sollte so gewählt werden, dass im Intensitätsbild ein klarer Kontrast zwischen den Objekten und der Basisebene sichtbar ist.
Taugliche Szene¶
Eine für das SilhouetteMatch-Modul taugliche Szene muss folgende Bedingungen erfüllen:
- Die zu erkennenden Objekte müssen, wie oben beschrieben, tauglich für das SilhouetteMatch-Modul sein.
- Nur Objekte, die zum selben Template gehören, dürfen gleichzeitig sichtbar sein (sortenrein). Falls auch andere Objekte sichtbar sind, muss eine passende Region of Interest (ROI) festgelegt werden.
- Alle sichtbaren Objekte befinden sich auf einer gemeinsamen Basisebene, welche kalibriert werden muss.
- Die Verkippung der Basisebene zur Blickrichtung der Kamera darf 10 Grad nicht übersteigen.
- Die Objekte sind weder teilweise noch komplett verdeckt.
- Alle sichtbaren Objekte liegen richtig herum.
- Die Objektkanten, welche abgeglichen werden sollen, sind sowohl im linken als auch im rechten Kamerabild zu sehen.
Kalibrierung der Basisebene¶
Bevor Objekte erkannt werden können, muss die Basisebene kalibriert werden. Hierbei wird die Distanz und der Winkel der Ebene, auf welcher die Objekte liegen, gemessen und persistent auf dem rc_visard gespeichert.
Durch die Trennung der Kalibrierung der Basisebene von der eigentlichen Objekterkennung werden beispielsweise Szenarien ermöglicht, in denen die Basisebene zeitweise verdeckt ist. Darüber hinaus wird die Berechnungszeit der Objekterkennung für Szenarien verringert, in denen die Basisebene für eine gewisse Zeit fixiert ist – die Basisebene muss in diesem Fall nicht fortlaufend neu detektiert werden.
Die Kalibrierung der Basisebene kann mit drei unterschiedlichen Verfahren durchgeführt werden, auf die im Folgenden näher eingegangen wird:
- AprilTag-basiert
- Stereo-basiert
- Manuell
Die Kalibrierung ist erfolgreich, solange der Normalenvektor der Basisebene höchstens 10 Grad gegen die Blickrichtung der Kamera verkippt ist. Eine erfolgreiche Kalibrierung wird persistent auf dem rc_visard gespeichert, bis sie entweder gelöscht wird oder eine neue Kalibrierung durchgeführt wird.
Bemerkung
Um Datenschutzproblemen entgegenzuwirken, wird die Visualisierung der Kalibrierung der Basisebene nach einem Neustart des rc_visard verschwommen dargestellt.
In Szenarien, in denen die Basisebene nicht direkt kalibriert werden kann, ist es auch möglich, zu einer zur Basisebene parallel liegenden Ebene zu kalibrieren. In diesem Fall kann der Parameter offset benutzt werden, um die geschätzte Ebene auf die eigentliche Basisebene zu verschieben. Der Parameter offset gibt die Distanz in Metern an, um welche die geschätzte Ebene in Richtung der Kamera verschoben wird.
In der REST-API ist eine Ebene durch eine Normale (normal) und einen Abstand (distance) definiert. normal ist ein normalisierter 3-Vektor, welcher die Normale der Ebene spezifiziert. Die Normale zeigt immer von der Kamera weg. distance repräsentiert den Abstand der Ebene von der Kamera in Richtung der Normale. normal und distance können auch als \(a\), \(b\), \(c\), bzw. \(d\) der Ebenengleichung interpretiert werden:
AprilTag-basierte Kalibrierung der Basisebene¶
Die AprilTag-Erkennung (siehe TagDetect) wird benutzt, um AprilTags in der Szene zu finden und eine Ebene durch diese zu legen. Mindestens drei AprilTags müssen so auf der Basisebene platziert werden, dass sie im linken und rechten Kamerabild zu sehen sind. Die AprilTags sollten ein möglichst großes Dreieck aufspannen. Je größer das Dreieck ist, desto höher wird die Genauigkeit der Schätzung der Basisebene. Diese Methode sollte benutzt werden, wenn die Basisebene untexturiert und kein externer Projektor mit Zufallsmuster angeschlossen ist. Diese Kalibriermethode ist sowohl über die REST-API-Schnittstelle als auch über die rc_visard Web GUI verfügbar.
Stereo-basierte Kalibrierung der Basisebene¶
Die 3D-Punktwolke, welche vom Stereo-Matching-Modul berechnet wird, wird benutzt um eine Ebene in den 3D-Punkten zu finden. Die Region of Interest (ROI) sollte für diese Methode deshalb so gewählt werden, dass nur die relevante Basisebene eingeschlossen wird. Der Parameter plane_preference erlaubt es auszuwählen, ob die zur Kamera am nächsten gelegene oder die von der Kamera am weitesten entfernte Ebene als Basisebene benutzt wird. Die am nächsten gelegene Ebene kann in Szenarien ausgewählt werden, in denen die Basisebene vollständig von Objekten verdeckt wird oder für die Kalibrierung nicht erreichbar ist. Diese Methode sollte benutzt werden, wenn die Basisebene texturiert ist oder ein Projektor mit Zufallsmuster angeschlossen ist. Diese Kalibriermethode ist sowohl über die REST-API-Schnittstelle als auch über die rc_visard Web GUI verfügbar.
Manuelle Kalibrierung der Basisebene¶
Die Basisebene kann manuell gesetzt werden, falls die Parameter bekannt sind – beispielsweise von einer vorangegangenen Kalibrierung. Diese Kalibriermethode ist nur über die REST-API-Schnittstelle und nicht über die rc_visard Web GUI verfügbar.
Setzen einer Region of Interest¶
Falls Objekte nur in einem Teil des Sichtfelds der Kamera erkannt werden sollen, kann eine 2D Region of Interest (ROI) gesetzt werden, wie in Region of Interest beschrieben wird.
Setzen von Greifpunkten¶
Um das SilhouetteMatch-Modul direkt in einer Roboteranwendung zu nutzen, können für jedes Template bis zu 50 Greifpunkte definiert werden. Ein Greifpunkt repräsentiert die gewünschte Position und Orientierung des Roboter-TCPs (Tool Center Point), mit der das Objekt gegriffen werden kann (siehe Abb. 35).

Abb. 35 Definition von Greifpunkten bezogen auf den Roboter-TCP
Jeder Greifpunkt enthält eine id, die eindeutig über alle Greifpunkte eines Objekt-Templates sein muss, die ID des Templates (template_id), zu dem der Greifpunkt hinzugefügt wird, und die Greifpose (pose) im Koordinatensystem des Templates. Greifpunkte können über die REST-API-Schnittstelle, oder über die interaktive Visualisierung in der Web GUI definiert werden. Zudem kann einem Greifpunkt eine Priorität (von -2 für sehr niedrig bis 2 für sehr hoch) zugewiesen werden. Prioritäten können Roboteranwendungen vereinfachen, oder die Rechenzeit der Kollisionsprüfung verkürzen, wenn der Parameter only_highest_priority_grasp aktiviert ist. In diesem Fall endet die Kollisionsprüfung, wenn Greifpunkte mit der höchsten Priorität gefunden sind. Weiterhin können Greifpunkte unterschiedlichen Greifern zugewiesen werden, indem die ID des Greifers (gripper_id) spezifiziert wird. Dieser Greifer wird dann anstelle des Greifers, welcher im detect_object Service definiert ist, für die Kollisionsprüfung des zugehörigen Greifpunkts verwendet.
Wird ein Greifpunkt auf einem symmetrischen Objekt definiert, werden alle Greifpunkte, die zu diesem symmetrisch sind, automatisch im detect_object Service des SilhouetteMatch Moduls mit berücksichtigt. Symmetrische Greifpunkte zu einem gegebenen Greifpunkt können mittels des get_symmetric_grasps Services abgefragt werden und in der Web GUI visualisiert werden.
Benutzer können ebenfalls Replikationen eines Greifpunktes um eine selbst-definierte Achse definieren. Eine Replikation generiert mehrere Greifpunkte und sorgt dafür, dass Benutzer nicht zu viele Greifpunkte manuell setzen müssen. Der Ursprung der Replikation ist als Koordinatensystem im Objektkoordinatensystem definiert und die x-Achse dieses Koordinatensystems entspricht der Replikationsachse. Der Greifpunkt wird repliziert, indem er ausgehend von seiner ursprünglichen Pose um diese x-Achse gedreht wird. Die Replikation erfolgt in step_x_deg-Grad Schritten. Der Bereich wird durch die minimalen und maximalen Endpunkte min_x_deg und max_x_deg bestimmt. Der minimale (maximale) Endpunkt muss nicht-positiv (nicht-negativ) sein.
Setzen von Greifpunkten in der Web GUI¶
Die rc_visard Web GUI bietet eine interaktive und intuitive Möglichkeit, Greifpunkte für Objekt-Templates zu setzen. Im ersten Schritt muss das Objekt-Template auf den rc_visard hochgeladen werden. Das kann über die Web GUI in einer beliebigen Kamerapipeline unter erfolgen, indem im Abschnitt Templates und Greifpunkte auf + Neues Template hinzufügen geklickt wird, oder unter im Abschnitt SilhouetteMatch Templates und Greifpunkte. Wenn der Upload abgeschlossen ist, erscheint ein Fenster mit einer 3D-Visualisierung des Templates, in dem Greifpunkte hinzugefügt oder existierende Greifpunkte bearbeitet werden können. Dasselbe Fenster erscheint, wenn ein vorhandenes Template bearbeitet wird. Wenn das Template ein Kollisionsmodell oder ein Visualisierungsmodell enthält, wird dieses Modell ebenfalls angezeigt.
Dieses Fenster bietet zwei Möglichkeiten, um Greifpunkte zu setzen:
- Greifpunkte manuell hinzufügen: Durch Klicken auf das + Symbol wird ein neuer Greifpunkt im Ursprung des Templates angelegt. Diesem Greifpunkt kann ein eindeutiger Name gegeben werden, der seiner ID entspricht. Die gewünschte Pose des Greifpunkts im Koordinatensystem des Templates kann in den Feldern für Position und Roll/Pitch/Yaw eingegeben werden. Die Greifpunkte können frei platziert werden, auch außerhalb oder innerhalb des Templates, und werden mit ihrer Orientierung zur Überprüfung in der Visualisierung veranschaulicht.
- Greifpunkte interaktiv hinzufügen: Greifpunkte können interaktiv zu einem Template hinzugefügt werden, indem zuerst auf den Button Greifpunkt hinzufügen oben rechts in der Visualisierung und anschließend auf den gewünschten Punkt auf dem Template geklickt wird. Wenn ein 3D-Modell angezeigt wird, wird der Greifpunkt an die Oberfläche des Modells angeheftet, andernfalls an die Template-Oberfläche. Die Orientierung des Greifpunkts entspricht einem rechtshändigen Koordinatensystem, sodass die z-Achse senkrecht auf der Template-Oberfläche steht und in das Template hinein gerichtet ist. Die Position und Orientierung des Greifpunkts im Koordinatensystem des Templates ist auf der rechten Seite angezeigt. Die Position und Orientierung des Greifpunkts kann auch interaktiv verändert werden. Für den Fall, dass An Oberfläche anheften in der Visualisierung deaktiviert ist (das ist der Standardwert), kann der Greifpunkt in allen drei Dimensionen frei verschoben und gedreht werden, indem in der Visualisierung auf Greifpunkt bewegen geklickt wird und der Greifpunkt dann entlang der Achse zur gewünschten Position verschoben wird. Die Orientierung des Greifpunkts kann ebenfalls interaktiv verändert werden, indem die Achse mit der Maus rotiert wird. Wenn An Oberfläche anheften nicht aktiv ist, kann der Greifpunkt nur auf der Objektoberfläche verschoben und rotiert werden.
Benutzer können auch eine Greifpunktpriorität festlegen, indem sie den Schieberegler Priorität ändern. Ein dedizierter Greifer kann im Dropdown-Feld Greifer ausgewählt werden.
Durch Aktivieren des Kontrollkästchens Replizieren können Benutzer den Greifpunkt um eine benutzerdefinierte Achse replizieren. Die Replikationsachse und die generierten Greifpunkte werden visualisiert. Die Lage und Ausrichtung der Replikationsachse relativ zum Objektkoordinatensystem kann interaktiv angepasst werden, indem im Visualisierungsmenü auf Replikationsachse bewegen geklickt und die Achse an die gewünschte Position und Ausrichtung gezogen wird. Die Greifpunkte werden innerhalb des angegebenen Drehbereichs mit der ausgewählten Schrittgröße repliziert. Benutzer können eine Visualisierung die replizierten Greifpunkte durchlaufen, indem sie die Leiste unter Durchlaufen n repl. Greifpunkte im Abschnitt Ansichtsoptionen des Visualisierungsmenüs ziehen. Wenn für den Greifpunkt ein Greifer ausgewählt ist oder im Visualisierungsmenü ein Greifer ausgewählt wurde, wird der Greifer auch am aktuell ausgewählten Greifpunkt angezeigt.
Wenn das Template Symmetrien hat, können die Greifpunkte, die symmetrisch zum definierten Greifpunkt sind, zusammen mit ihren Replikationen (sofern definiert) durch Klick auf Symmetrische Greifpunkte einblenden angezeigt werden. Visualisierungen der symmetrischen Greifpunkte können ebenfalls durchlaufen werden, indem die Leiste unter Durchlaufe n symm. Greifpunkte im Abschnitt Ansichtsoptionen des Visualisierungsmenüs bewegt wird.
Setzen von Greifpunkten über die REST-API¶
Greifpunkte können über die REST-API-Schnittstelle mithilfe des set_grasp oder set_all_grasps Services gesetzt werden (siehe Interne Services). Ein Greifpunkt besteht aus der id, die eindeutig über alle Greifpunkte eines Objekt-Templates sein muss, der ID des Templates (template_id), zu dem der Greifpunkt hinzugefügt wird, und der Greifpose (pose). Die Pose ist im Koordinatensystem des Templates angegeben und besteht aus einer Position (position) in Metern und einer Orientierung (orientation) als Quaternion. Ein dedizierter Greifer kann durch Setzen des Feldes gripper_id angegeben werden. Die priority wird durch einen ganzzahligen Wert angegeben, der von -2 für sehr niedrig bis 2 für sehr hoch reicht. Der Replikationsursprung ist als eine Transformation im Koordinatensystem des Objekts definiert und die x-Achse der Transformation entspricht der Replikationsachse. Der Replikationsbereich wird durch die Felder min_x_deg und max_x_deg und die Schrittweite step_x_deg gesteuert.
Setzen der bevorzugten TCP-Orientierung¶
Das SilhouetteMatch-Modul berechnet die Erreichbarkeit von Greifpunkten basierend auf der bevorzugten Orientierung des Greifers oder TCPs. Die bevorzugte Orientierung kann über den Service set_preferred_orientation oder über die SilhouetteMatch-Seite in der Web GUI gesetzt werden. Die resultierende Richtung der z-Achse des TCP wird genutzt, um Greifpunkte zu verwerfen, die der Greifer nicht erreichen kann. Weiterhin kann die bevorzugte Orientierung genutzt werden, um die erreichbaren Greifpunkte zu sortieren, indem die entsprechende Sortierstrategie ausgewählt wird.
Die bevorzugte TCP-Orientierung kann im Kamerakoordinatensystem oder im externen Koordinatensystem gesetzt werden, wenn eine Hand-Auge-Kalibrierung verfügbar ist. Wenn die bevorzugte TCP-Orientierung im externen Koordinatensystem definiert ist, und der Sensor am Roboter montiert ist, muss bei jedem Aufruf der Objekterkennung die aktuelle Roboterpose angegeben werden, damit die bevorzugte Orientierung zur Filterung und optional zur Sortierung der Greifpunkte auf den erkannten Objekten genutzt werden kann. Wenn keine bevorzugte TCP-Orientierung gesetzt wird, wird die Orientierung der linken Kamera als die bevorzugte TCP-Orientierung genutzt.
Setzen der Sortierstrategie¶
Die vom detect_object Service zurückgelieferten Objekte und Greifpunkte werden gemäß einer Sortierstrategie sortiert, die vom Nutzer gewählt werden kann. Folgende Sortierstrategien sind verfügbar und können über die Web GUI oder über den set_sorting_strategies Service gesetzt werden:
preferred_orientation: Objekte und Greifpunkte mit der geringsten Rotationsänderung zwischen ihrer Orientierung und der bevorzugten TCP-Orientierung werden zuerst zurückgeliefert.direction: Objekte und Greifpunkte mit dem kleinsten Abstand entlang der gesetzten Richtungvectorim angegebenen Referenzkoordinatensystempose_framewerden zuerst zurückgeliefert.
Wenn keine Sortierstrategie gesetzt ist, oder die Standard-Sortierstrategie in der Web GUI ausgewählt ist, geschieht die Sortierung der Greifpunkte basierend auf einer Kombination von preferred_orientation und dem kleinsten Abstand entlang der z-Achse der bevorzugten TCP-Orientierung von der Kamera.
Objekterkennung¶
Objekte können erst nach einer erfolgreichen Kalibrierung der Basisebene erkannt werden. Es muss sichergestellt werden, dass sich Position und Orientierung der Basisebene zwischen Kalibrierung und Objekterkennung nicht ändern. Anderenfalls muss die Kalibrierung erneuert werden.
Um eine Objekterkennung durchzuführen, müssen im Allgemeinen die folgenden Serviceargumente an das SilhouetteMatch-Modul übergeben werden:
- das Template des Objekts, welches in der Szene erkannt werden soll
- das Koordinatensystem, in dem die Posen der detektierten Objekte zurückgegeben werden sollen (siehe Hand-Auge-Kalibrierung)
Optional können auch folgende Serviceargumente an das SilhouetteMatch-Modul übergeben werden:
- ein Versatz, falls Objekte nicht direkt auf der Basisebene liegen, sondern auf einer zu dieser parallelen Ebene. Der Versatz bezeichnet die Distanz beider Ebenen in Richtung der Kamera. Wenn dieser Wert nicht gesetzt wird, wird ein Versatz von 0 angenommen.
- die ID des Load Carriers, der die zu detektierenden Objekte enthält
- die ID der Region of Interest, innerhalb der nach dem Load Carrier gesucht wird, oder – falls kein Load Carrier angegeben ist – die Region of Interest, innerhalb der Objekte erkannt werden sollen. Wenn keine ROI gesetzt wird, werden Objekte im gesamten Kamerabild gesucht.
- die aktuelle Roboterpose, wenn die Kamera am Roboter montiert ist und als Koordinatensystem
externalgewählt wurde, oder die bevorzugte TCP-Orientierung im externen Koordinatensystem angegeben ist - Informationen für die Kollisionsprüfung: Die ID des Greifers, um die Kollisionsprüfung zu aktivieren, und optional ein Greif-Offset, der die Vorgreifposition definiert. Details zur Kollisionsprüfung sind in CollisionCheck gegeben.
Im Ausprobieren-Abschnitt der Seite SilhouetteMatch der Web GUI kann die Objektdetektion ausprobiert werden. Das Ergebnis wird, wie in Abb. 36 dargestellt, visualisiert.
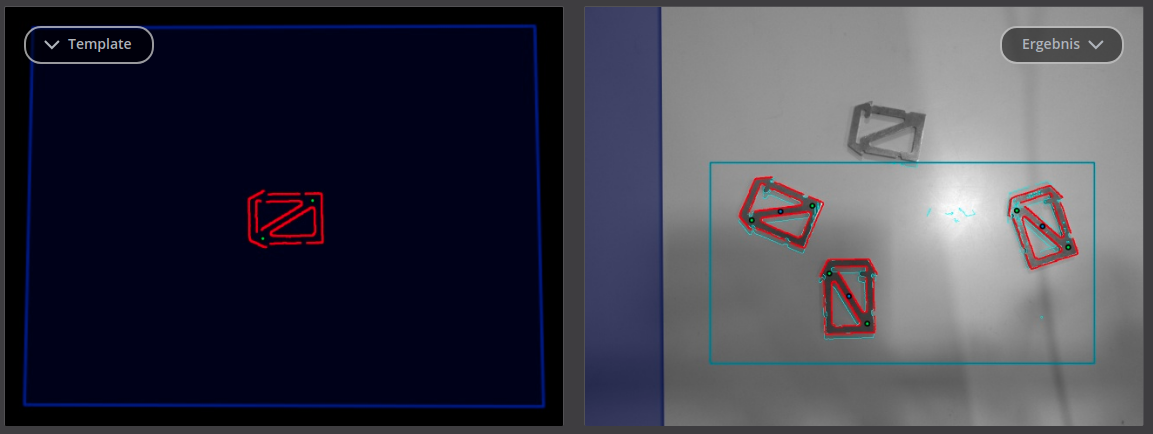
Abb. 36 Ergebnisbild des SilhouetteMatch-Moduls, wie über die Web GUI dargestellt
Das linke Bild zeigt die kalibrierte Basisebene in blau und das zu erkennende Template in rot mit den Greifpunkten (siehe Setzen von Greifpunkten) in grün. Das Template wird passend zu Abstand und Verkippung der Basisebene verformt dargestellt.
Das rechte Bild zeigt das Detektionsergebnis. Die blau schattierte Fläche auf der linken Seite markiert den Teil des linken Kamerabilds, welcher nicht mit dem rechten Kamerabild überlappt. In diesem Bereich können keine Objekte erkannt werden. Die gewählte Region of Interest wird als petrolfarbenes Rechteck dargestellt. Erkannte Kanten im Bild werden in hellem Blau und erkannte Objekte (instances) in rot visualisiert. Blaue Punkte markieren jeweils den Ursprung der detektierten Objekte, wie im Template festgelegt. Erreichbare Greifpunkte sind als grüne Punkte dargestellt. Nicht erreichbare Greifpunkte werden als rote Punkte visualisiert (nicht im Bild dargestellt).
Die Posen der Objektursprünge werden im gewählten Koordinatensystem zurückgegeben. Die Orientierung der erkannten Objekte ist mit der Normalen der Basisebene ausgerichtet. Wenn das ausgewählte Template auch Greifpunkte hat, dann wird zusätzlich zu den erkannten Objekten auch eine Liste von Greifpunkten (grasps) für alle erkannten Objekte zurückgegeben. Die Posen der Greifpunkte sind im gewünschten Koordinatensystem angegeben und die Liste ist gemäß der gewählten Sortierstrategie sortiert (siehe Setzen der Sortierstrategie). Die erkannten Objekte und die Greifpunkte können über ihre UUIDs einander zugeordnet werden.
Falls das Template eine kontinuierliche Rotationssymmetrie aufweist (z.B. zylindrische Objekte), besitzen alle Ergebnisposen die gleiche Orientierung. Weiterhin werden alle Symmetrien eines Greifpunkts auf Erreichbarkeit und Kollisionsfreiheit geprüft, und anschließend nur der jeweilige beste gemäß der gewählten Sortierstrategie zurückgeliefert.
Für Objekte mit einer diskreten Symmetrie (z.B. prismatische Objekte), werden alle kollisionsfreien Symmetrien jedes Greifpunkts, die entsprechend der gesetzten bevorzugten TCP-Orientierung erreichbar sind, zurückgeliefert, und gemäß der gewählten Sortierstrategie sortiert.
Die Detektionsergebnisse und Berechnungszeiten werden durch Laufzeitparameter beeinflusst, welche weiter unten aufgezählt und beschrieben werden. Unsachgemäße Parameterwerte können zu Zeitüberschreitungen im Detektionsprozess des SilhouetteMatch-Moduls führen.
Wechselwirkung mit anderen Modulen¶
Die folgenden auf dem rc_visard laufenden Module liefern Daten für das SilhouetteMatch-Modul oder haben Einfluss auf die Datenverarbeitung.
Bemerkung
Jede Konfigurationsänderung dieser Module kann direkte Auswirkungen auf die Qualität oder das Leistungsverhalten des SilhouetteMatch-Moduls haben.
Stereokamera und Stereo-Matching¶
Das SilhouetteMatch-Modul verarbeitet intern die rektifizierten Bilder des Kamera-Moduls (rc_camera). Es sollte deshalb auf eine passende Belichtungszeit geachtet werden, um optimale Ergebnisse zu erhalten.
Für die Kalibrierung der Basisebene mit der Stereo-Methode wird das Disparitätsbild des Stereo-Matching-Moduls (rc_stereomatching) verarbeitet. Abgesehen davon sollte das Stereo-Matching-Modul nicht parallel zum SilhouetteMatch-Modul ausgeführt werden, da die Laufzeit der Objekterkennung sonst negativ beeinflusst wird.
Für beste Ergebnisse wird empfohlen, Glättung für Stereo-Matching zu aktivieren.
IOControl und Projektor-Kontrolle¶
Wenn der rc_visard in Verbindung mit einem externen Musterprojektor und dem Modul IOControl und Projektor-Kontrolle (rc_iocontrol) betrieben wird, sollte der Projektor für die stereobasierte Kalibrierung der Basisebene benutzt werden.
Das projizierte Muster darf während der Objektdetektion nicht im linken oder rechten Kamerabild sichtbar sein, da es den Detektionsvorgang behindert. Der Projektor sollte deshalb entweder ausgeschaltet sein oder im Modus ExposureAlternateActive betrieben werden.
Hand-Auge-Kalibrierung¶
Wenn die Kamera zu einem Roboter kalibriert ist, kann das SilhouetteMatch-Modul die Ergebnisposen automatisch im Roboterkoordinatensystem liefern. Für die Services des SilhouetteMatch-Moduls kann das Referenzkoordinatensystem aller Posen über das Argument pose_frame angegeben werden.
Es kann zwischen den folgenden zwei Werten für pose_frame gewählt werden:
- Kamera-Koordinatensystem (
camera): Alle Posen und Ebenenparameter werden im Kamera-Koordinatensystem angegeben. - Benutzerdefiniertes externes Koordinatensystem (
external): Alle Posen und Ebenenparameter sind im sogenannten externen Koordinatensystem angegeben, welches vom Nutzer während der Hand-Auge-Kalibrierung gewählt wurde. In diesem Fall bezieht das SilhouetteMatch-Modul alle notwendigen Informationen über die Kameramontage und die kalibrierte Hand-Auge-Transformation automatisch vom internen Modul Hand-Auge-Kalibrierung. Für den Fall einer robotergeführten Kamera ist vom Nutzer zusätzlich die jeweils aktuelle Roboterposerobot_poseanzugeben.
Zulässige Werte zur Angabe des Referenzkoordinatensystems sind camera und external. Andere Werte werden als ungültig zurückgewiesen.
Bemerkung
Wurde keine Hand-Auge-Kalibrierung durchgeführt, muss als Referenzkoordinatensystem pose_frame immer camera angegeben werden.
Bemerkung
Wird die Hand-Auge-Kalibrierung nach einer Kalibrierung der Basisebene verändert, wird die Kalibrierung der Basisebene als ungültig markiert und muss erneuert werden.
Für den Fall einer robotergeführten Kamera ist es abhängig von pose_frame, der bevorzugten TCP-Orientierung und der Sortierrichtung nötig, zusätzlich die aktuelle Roboterpose (robot_pose) zur Verfügung zu stellen:
- Wenn
externalalspose_frameausgewählt ist, ist die Angabe der Roboterpose obligatorisch. - Wenn die bevorzugte TCP-Orientierung in
externaldefiniert ist, ist die Angabe der Roboterpose obligatorisch. - Wenn die Sortierrichtung in
externaldefiniert ist, ist die Angabe der Roboterpose obligatorisch. - In allen anderen Fällen ist die Angabe der Roboterpose optional.
Wenn die aktuelle Roboterpose während der Kalibrierung der Basisebene angegeben wird, wird sie persistent auf dem rc_visard gespeichert. Falls für die Services get_base_plane_calibration oder detect_objects die dann aktuelle Roboterpose ebenfalls angegeben wird, wird die Basisebene automatisch zu der neuen Roboterpose transformiert. Das erlaubt dem Benutzer, die Roboterpose (und damit die Pose der Kamera) zwischen Kalibrierung der Basisebene und Objekterkennung zu verändern.
Bemerkung
Eine Objekterkennung kann nur durchgeführt werden, wenn die Verkippung der Basisebene zur Sichtachse der Kamera ein 10-Grad-Limit nicht übersteigt.
LoadCarrier¶
Das SilhouetteMatch Modul nutzt die Funktionalität zur Load Carrier Erkennung aus dem LoadCarrier Modul (rc_load_carrier) mit den Laufzeitparametern, die für dieses Modul festgelegt wurden. Wenn sich jedoch mehrere Load Carrier in der Szene befinden, die zu der angegebenen Load Carrier ID passen, wird nur einer davon zurückgeliefert. In diesem Fall sollte eine Region of Interest gesetzt werden, um sicherzustellen, dass immer derselbe Load Carrier für das SilhouetteMatch Modul verwendet wird.
CollisionCheck¶
Die Kollisionsprüfung kann für die Greifpunktberechnung des SilhouetteMatch-Moduls aktiviert werden, indem das collision_detection Argument an den detect_object Service übergeben wird. Es enthält die ID des benutzten Greifers und optional einen Greif-Offset. Der Greifer muss im GripperDB Modul definiert werden (siehe Erstellen eines Greifers) und Details über die Kollisionsprüfung werden in Integrierte Kollisionsprüfung in anderen Modulen gegeben. Zusätzlich wird auf Kollisionen zwischen dem Greifer und der kalibrierten Basisebene geprüft, wenn der Laufzeitparameter check_collisions_with_base_plane auf true gesetzt ist. Wenn das ausgewählte Template ein Kollisionsmodell enthält und der Laufzeitparameter check_collisions_with_matches true ist, wird außerdem auch auf Kollisionen zwischen dem Greifer und den anderen detektierten Objekten (nicht begrenzt auf die Anzahl max_number_of_detected_objects) geprüft, wobei das Objekt, auf dem sich der jeweilige Greifpunkt befindet, von der Prüfung ausgenommen ist.
Wenn die Kollisionsprüfung aktiviert ist, werden nur kollisionsfreie Greifpunkte zurückgeliefert. Jedoch werden in der Ergebnis-Visualisierung oben auf der SilhouetteMatch-Seite der Web GUI kollidierende Greifpunkte als rote Punkte dargestellt. Die Objekte, die bei der Kollisionsprüfung betrachtet werden, werden auch mit roten Kanten visualisiert.
Die Laufzeitparameter des CollisionCheck-Moduls beeinflussen die Kollisionserkennung wie in CollisionCheck-Parameter beschrieben.
Parameter¶
Das SilhouetteMatch-Modul wird in der REST-API als rc_silhouettematch bezeichnet und in der Web GUI unter dargestellt. Der Benutzer kann die Parameter entweder dort oder über die REST-API-Schnittstelle ändern.
Übersicht über die Parameter¶
Dieses Softwaremodul bietet folgende Laufzeitparameter:
| Name | Typ | Min. | Max. | Default | Beschreibung |
|---|---|---|---|---|---|
check_collisions_with_-base_plane |
bool | false | true | true | Gibt an, ob Kollisionen zwischen Greifer und der Basisebene geprüft werden |
check_collisions_with_matches |
bool | false | true | true | Gibt an, ob Kollisionen zwischen Greifer und anderen Matches geprüft werden |
edge_sensitivity |
float64 | 0.1 | 1.0 | 0.7 | Empfindlichkeit der Kantenerkennung |
match_max_distance |
float64 | 0.1 | 10.0 | 3.0 | Der maximale tolerierte Abstand zwischen dem Template und den detektierten Kanten im Bild in Pixeln |
match_percentile |
float64 | 0.7 | 1.0 | 0.8 | Der Anteil der Template-Pixel, die innerhalb der maximalen Matchingdistanz liegen müssen, um ein Objekt erfolgreich zu detektieren |
max_number_of_detected_objects |
int32 | 1 | 20 | 10 | Maximale Anzahl der zu detektierenden Objekte |
only_highest_priority_grasps |
bool | false | true | false | Falls aktiviert werden nur Greifpunkte der höchsten Priorität zurückgegeben. |
quality |
string | - | - | High | Quality: [Low, Medium, High] |
Beschreibung der Laufzeitparameter¶
Die Laufzeitparameter werden zeilenweise auf der SilhouetteMatch-Seite in der Web GUI dargestellt. Im folgenden wird der Name des Parameters in der Web GUI in Klammern hinter dem eigentlichen Parameternamen angegeben. Die Parameter sind in derselben Reihenfolge wie in der Web GUI aufgelistet:
max_number_of_detected_objects (Maximale Objektanzahl)¶
Dieser Parameter gibt an, wie viele Objekte maximal in der Szene erkannt werden sollen. Falls mehr als die angegebene Zahl an Objekten gefunden wurden, werden nur die am besten zur gewählten Sortierstrategie passenden Ergebnisse zurückgeliefert.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/parameters/parameters?max_number_of_detected_objects=<value>PUT http://<host>/api/v1/nodes/rc_silhouettematch/parameters?max_number_of_detected_objects=<value>
quality (Qualität)¶
Die Objekterkennung kann auf Bildern mit unterschiedlicher Auflösung durchgeführt werden:
High(Hoch, volle Auflösung),Medium(Mittel, halbe Auflösung) oderLow(Niedrig, Viertel-Auflösung). Je niedriger die Auflösung ist, desto niedriger ist die Berechnungszeit der Objekterkennung, aber desto weniger Objektdetails sind erkennbar.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/parameters/parameters?quality=<value>PUT http://<host>/api/v1/nodes/rc_silhouettematch/parameters?quality=<value>
match_max_distance (Maximale Matchingdistanz)¶
Dieser Parameter gibt den maximal tolerierten Abstand zwischen dem Template und den detektierten Kanten im Bild in Pixeln an. Falls das Objekt durch das Template nicht exakt genug beschrieben wird, wird es möglicherweise nicht erkannt, wenn dieser Wert zu klein ist. Höhere Werte können jedoch im Fall von komplexen Szenen und bei ähnlichen Objekten zu Fehldetektionen führen, und auch die Berechnungszeit erhöhen.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/parameters/parameters?match_max_distance=<value>PUT http://<host>/api/v1/nodes/rc_silhouettematch/parameters?match_max_distance=<value>
match_percentile (Matching Perzentil)¶
Dieser Parameter kontrolliert, wie strikt der Detektionsprozess sein soll. Das Matching Perzentil gibt den Anteil der Template-Pixel an, die innerhalb der maximalen Matchingdistanz liegen müssen, um ein Objekt erfolgreich zu detektieren. Je höher der Wert, desto exakter muss ein Match sein, um als gültig angesehen zu werden.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/parameters/parameters?match_percentile=<value>PUT http://<host>/api/v1/nodes/rc_silhouettematch/parameters?match_percentile=<value>
edge_sensitivity (Kantenempfindlichkeit)¶
Der Parameter beeinflusst, wie viele Kanten in den Kamerabildern gefunden werden. Umso größer dieser Parameter gewählt wird, umso mehr Kanten werden für die Erkennung benutzt. Eine große Anzahl von Kanten im Bild kann die Erkennung verlangsamen.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/parameters/parameters?edge_sensitivity=<value>PUT http://<host>/api/v1/nodes/rc_silhouettematch/parameters?edge_sensitivity=<value>
only_highest_priority_grasps (Nur Greifpunkte höchster Priorität)¶
Wenn dieser Parameter auf true gesetzt ist, werden ausschließlich Greifpunkte der höchsten Priorität zurückgegeben. Sofern die Kollisionsprüfung aktiviert ist, werden ausschließlich kollisionsfreie Greifpunkt der höchstmöglichen Priorität zurückgegeben. Dadurch kann Rechenzeit gespart und die Anzahl der applikationsseitig zu verarbeitenden Greifpunkte reduziert werden.
Ohne Kollisionsprüfung werden nur Greifpunkt der höchsten Priorität zurückgegeben.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_silhouettematch/parameters?only_highest_priority_grasps=<value>PUT http://<host>/api/v1/nodes/rc_silhouettematch/parameters?only_highest_priority_grasps=<value>
check_collisions_with_base_plane (Kollisionsprüfung mit Basisebene)¶
Wenn dieser Parameter auf true gesetzt ist und die Kollisionsprüfung durch Übergabe eines Greifers an den
detect_objectService aktiviert ist, werden alle Greifpunkte auf Kollisionen zwischen dem Greifer und der kalibrierten Basisebene geprüft. Nur Greifpunkte, bei denen der Greifer nicht in Kollision mit der Basisebene wäre, werden zurückgeliefert.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/parameters/parameters?check_collisions_with_base_plane=<value>PUT http://<host>/api/v1/nodes/rc_silhouettematch/parameters?check_collisions_with_base_plane=<value>
check_collisions_with_matches (Kollisionsprüfung mit Matches)¶
Wenn dieser Parameter auf true gesetzt ist und die Kollisionsprüfung durch Übergabe eines Greifers an den
detect_objectService aktiviert ist, werden alle Greifpunkte auf Kollisionen zwischen dem Greifer und den anderen detektierten Objekten (nicht begrenzt auf die Anzahlmax_number_of_detected_objects) geprüft. Nur Greifpunkte, bei denen der Greifer nicht in Kollision mit anderen detektierten Objekten wäre, werden zurückgeliefert.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/parameters/parameters?check_collisions_with_matches=<value>PUT http://<host>/api/v1/nodes/rc_silhouettematch/parameters?check_collisions_with_matches=<value>
Statuswerte¶
Dieses Modul meldet folgende Statuswerte.
| Name | Beschreibung |
|---|---|
data_acquisition_time |
Zeit in Sekunden, für die beim letzten Aufruf auf Bilddaten gewartet werden musste |
last_timestamp_processed |
Zeitstempel des letzten verarbeiteten Bilddatensatzes |
load_carrier_detection_time |
Berechnungszeit für die letzte Load Carrier Detektion in Sekunden |
| ``processing_time` | Berechnungszeit für die letzte Detektion (einschließlich Load Carrier Detektion) in Sekunden |
Services¶
Die angebotenen Services des rc_silhouettematch-Moduls können mithilfe der REST-API-Schnittstelle oder der rc_visard Web GUI ausprobiert und getestet werden.
Das SilhouetteMatch-Modul bietet folgende Services.
detect_object¶
führt eine Objekterkennung durch, wie in Objekterkennung beschrieben. Der Service gibt die Posen aller gefundenen Objektinstanzen zurück.
Details
Das Zeitverhalten dieses Services garantiert, dass nur Bilddaten zur Erkennung benutzt werden, welche nach dem Anfragezeitpunkt generiert wurden.
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/detect_objectPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/detect_objectObligatorische Serviceargumente:
object_idinobject_to_detect: ID des Templates, welches erkannt werden soll.
pose_frame: siehe Hand-Auge-Kalibrierung.Potentiell obligatorische Serviceargumente:
robot_pose: siehe Hand-Auge-Kalibrierung.Optionale Serviceargumente:
offset: Versatz in Metern, um welche die Basisebene in Richtung der Kamera verschoben werden soll.
load_carrier_id: ID des Load Carriers, welcher die zu erkennenden Objekte enthält.
collision_detection: siehe Integrierte Kollisionsprüfung in anderen ModulenDie Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "collision_detection": { "gripper_id": "string", "pre_grasp_offset": { "x": "float64", "y": "float64", "z": "float64" } }, "load_carrier_id": "string", "object_to_detect": { "object_id": "string", "region_of_interest_2d_id": "string" }, "offset": "float64", "pose_frame": "string", "robot_pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } } } }Die maximale Anzahl der zurückgegebenen Instanzen kann über den
max_number_of_detected_objects-Parameter kontrolliert werden.
object_id: ID des erkannten Templates.
instances: Liste der erkannten Objektinstanzen, sortiert gemäß der gewählten Sortierstrategie.
grasps: Liste von Greifpunkten auf den erkannten Objekten. Die Greifpunkte sind gemäß der gewählten Sortierstrategie sortiert. Dieinstance_uuidgibt eine Referenz auf das detektierte Objekt ininstancesan, zu dem dieser Greifpunkt gehört. Die Liste der Greifpunkte wird auf die 100 besten Greifpunkte gekürzt, falls mehr erreichbare Greifpunkte gefunden werden. Jeder Greifpunkt enthält ein Flagcollision_checkedund das Feldgripper_id(siehe Integrierte Kollisionsprüfung in anderen Modulen).
load_carriers: Liste der erkannten Load Carrier (Behälter).
timestamp: Zeitstempel des Bildes, das für die Erkennung benutzt wurde.
return_code: enthält mögliche Warnungen oder Fehlercodes und Nachrichten.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "detect_object", "response": { "grasps": [ { "collision_checked": "bool", "gripper_id": "string", "id": "string", "instance_uuid": "string", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "priority": "int8", "timestamp": { "nsec": "int32", "sec": "int32" }, "uuid": "string" } ], "instances": [ { "grasp_uuids": [ "string" ], "id": "string", "object_id": "string", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "timestamp": { "nsec": "int32", "sec": "int32" }, "uuid": "string" } ], "load_carriers": [ { "height_open_side": "float64", "id": "string", "inner_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "outer_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "overfilled": "bool", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rim_ledge": { "x": "float64", "y": "float64" }, "rim_step_height": "float64", "rim_thickness": { "x": "float64", "y": "float64" }, "type": "string" } ], "object_id": "string", "return_code": { "message": "string", "value": "int16" }, "timestamp": { "nsec": "int32", "sec": "int32" } } }
calibrate_base_plane¶
führt die Kalibrierung der Basisebene durch, wie in Kalibrierung der Basisebene beschrieben.
Details
Eine erfolgreiche Kalibrierung der Basisebene wird persistent auf dem rc_visard gespeichert und vom Service zurückgegeben. Die Kalibrierung ist dauerhaft – auch über Firmware-Updates und -Wiederherstellungen hinweg – gespeichert.
Das Zeitverhalten dieses Services garantiert, dass nur Bilddaten zur Erkennung benutzt werden, welche nach dem Anfragezeitpunkt generiert wurden.
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/calibrate_base_planePUT http://<host>/api/v1/nodes/rc_silhouettematch/services/calibrate_base_planeObligatorische Serviceargumente:
plane_estimation_method: Methode der Kalibrierung der Basisebene. Gültige Werte sindSTEREO,APRILTAG,MANUAL.
pose_frame: siehe Hand-Auge-Kalibrierung.Potentiell obligatorische Serviceargumente:
planewenn fürplane_estimation_methodMANUALgewählt ist: Die Ebene, welche als Basisebene gesetzt wird.
robot_pose: siehe Hand-Auge-Kalibrierung.
region_of_interest_2d_id: ID der Region of Interest für die Kalibrierung der Basisebene.Optionale Serviceargumente:
offset: Versatz in Metern, um welchen die geschätzte Ebene in Richtung der Kamera verschoben wird.
plane_preferenceinstereo: Ob die der Kamera am nächsten (CLOSEST) gelegene oder die am weitesten entfernte (FARTHEST) Ebene als Basisebene benutzt wird. Diese Option kann nur gesetzt werden, fallsplane_estimation_methodaufSTEREOgesetzt ist. Valide Werte sindCLOSESTundFARTHEST. Falls der Wert nicht gesetzt ist, wirdFARTHESTverwendet.Die Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "offset": "float64", "plane": { "distance": "float64", "normal": { "x": "float64", "y": "float64", "z": "float64" } }, "plane_estimation_method": "string", "pose_frame": "string", "region_of_interest_2d_id": "string", "robot_pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "stereo": { "plane_preference": "string" } } }
plane: kalibrierte Basisebene.
timestamp: Zeitstempel des Bildes, das für die Kalibrierung benutzt wurde.
return_code: enthält mögliche Warnungen oder Fehlercodes und Nachrichten.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "calibrate_base_plane", "response": { "plane": { "distance": "float64", "normal": { "x": "float64", "y": "float64", "z": "float64" }, "pose_frame": "string" }, "return_code": { "message": "string", "value": "int16" }, "timestamp": { "nsec": "int32", "sec": "int32" } } }
get_base_plane_calibration¶
gibt die derzeitige Kalibrierung der Basisebene zurück.
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/get_base_plane_calibrationPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/get_base_plane_calibrationObligatorische Serviceargumente:
pose_frame: siehe Hand-Auge-Kalibrierung.Potentiell obligatorische Serviceargumente:
robot_pose: siehe Hand-Auge-Kalibrierung.Die Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "pose_frame": "string", "robot_pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } } } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "get_base_plane_calibration", "response": { "plane": { "distance": "float64", "normal": { "x": "float64", "y": "float64", "z": "float64" }, "pose_frame": "string" }, "return_code": { "message": "string", "value": "int16" } } }
delete_base_plane_calibration¶
löscht die derzeitige Kalibrierung der Basisebene.
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/delete_base_plane_calibrationPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/delete_base_plane_calibrationDieser Service hat keine Argumente.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "delete_base_plane_calibration", "response": { "return_code": { "message": "string", "value": "int16" } } }
set_preferred_orientation¶
speichert die bevorzugte TCP-Orientierung zum Berechnen der Erreichbarkeit der Greifpunkte, die zur Filterung und optional zur Sortierung der vom
detect_objectService zurückgelieferten Greifpunkte verwendet wird (siehe Setzen der bevorzugten TCP-Orientierung).Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/set_preferred_orientationPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/set_preferred_orientationDie Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "pose_frame": "string" } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "set_preferred_orientation", "response": { "return_code": { "message": "string", "value": "int16" } } }
get_preferred_orientation¶
gibt die bevorzugte TCP-Orientierung zurück, die für die Filterung und optional zur Sortierung der vom
detect_objectService zurückgelieferten Greifpunkte verwendet wird (siehe Setzen der bevorzugten TCP-Orientierung).Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/get_preferred_orientationPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/get_preferred_orientationDieser Service hat keine Argumente.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "get_preferred_orientation", "response": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "pose_frame": "string", "return_code": { "message": "string", "value": "int16" } } }
set_sorting_strategies¶
speichert die gewählte Strategie zur Sortierung der erkannten Objekte und Greifpunkte, die vom
detect_objectService zurückgeliefert werden (siehe Objekterkennung).Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/set_sorting_strategiesPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/set_sorting_strategiesNur eine Sortierstrategie darf einen Gewichtswert
weightgrößer als 0 haben. Wenn alle Werte fürweightauf 0 gesetzt sind, wird die Standardsortierstrategie verwendet.Wenn der Wert
weightfürdirectiongesetzt ist, mussvectorden Richtungsvektor enthalten undpose_frameaufcameraoderexternalgesetzt sein.Die Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "direction": { "pose_frame": "string", "vector": { "x": "float64", "y": "float64", "z": "float64" }, "weight": "float64" }, "preferred_orientation": { "weight": "float64" } } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "set_sorting_strategies", "response": { "return_code": { "message": "string", "value": "int16" } } }
get_sorting_strategies¶
gibt die gewählte Sortierstrategie zurück, die zur Sortierung der vom
detect_objectService zurückgelieferten Objekte und Greifpunkte verwendet wird (siehe Objekterkennung).Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/get_sorting_strategiesPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/get_sorting_strategiesDieser Service hat keine Argumente.Wenn alle Werte für
weight0 sind, wird die Standardsortierstrategie verwendet.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "get_sorting_strategies", "response": { "direction": { "pose_frame": "string", "vector": { "x": "float64", "y": "float64", "z": "float64" }, "weight": "float64" }, "preferred_orientation": { "weight": "float64" }, "return_code": { "message": "string", "value": "int16" } } }
reset_defaults¶
stellt die Werkseinstellungen der Parameter dieses Moduls wieder her und wendet sie an („factory reset“). Dies betrifft nicht die konfigurierten Templates, die Kalibrierung der Basisebene, die bevorzugte TCP-Orientierung und die gewählte Sortierstrategie.
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/reset_defaultsPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/reset_defaultsDieser Service hat keine Argumente.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "reset_defaults", "response": { "return_code": { "message": "string", "value": "int16" } } }
set_region_of_interest_2d (veraltet)¶
speichert eine 2D Region of Interest auf dem rc_visard.
Details
Dieser Service kann wie folgt aufgerufen werden.
Dieser Service ist in API Version 2 nicht verfügbar. Nutzen Sie stattdessen set_region_of_interest_2d inrc_roi_db.PUT http://<host>/api/v1/nodes/rc_silhouettematch/services/set_region_of_interest_2d
get_regions_of_interest_2d (veraltet)¶
gibt die mit
region_of_interest_2d_idsspezifizierten, gespeicherten 2D Regions of Interest zurück.Details
Dieser Service kann wie folgt aufgerufen werden.
Dieser Service ist in API Version 2 nicht verfügbar. Nutzen Sie stattdessen get_regions_of_interest_2d inrc_roi_db.PUT http://<host>/api/v1/nodes/rc_silhouettematch/services/get_regions_of_interest_2d
delete_regions_of_interest_2d (veraltet)¶
löscht die mit
region_of_interest_2d_idsspezifizierten, gespeicherten 2D Regions of Interest.Details
Dieser Service kann wie folgt aufgerufen werden.
Dieser Service ist in API Version 2 nicht verfügbar. Nutzen Sie stattdessen delete_regions_of_interest_2d inrc_roi_db.PUT http://<host>/api/v1/nodes/rc_silhouettematch/services/delete_regions_of_interest_2d
Interne Services¶
Die folgenden Services für die Konfiguration von Greifpunkten können sich in Zukunft ohne weitere Ankündigung ändern. Es wird empfohlen, das Setzen, Abrufen und Löschen von Greifpunkten über die Web GUI vorzunehmen.
set_grasp¶
speichert einen Greifpunkt für das angegebene Template auf dem rc_visard. Alle Greifpunkte sind dauerhaft gespeichert, auch über Firmware-Updates und -Wiederherstellungen hinweg.
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/set_graspPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/set_graspDie Definition des Typs
graspwird in Setzen von Greifpunkten beschrieben.Die Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "grasp": { "gripper_id": "string", "id": "string", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "priority": "int8", "replication": { "max_x_deg": "float64", "min_x_deg": "float64", "origin": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "step_x_deg": "float64" }, "template_id": "string" } } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "set_grasp", "response": { "return_code": { "message": "string", "value": "int16" } } }
set_all_grasps¶
Ersetzt die gesamte Liste von Greifpunkten auf dem rc_visard für das angegebene Template.
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/set_all_graspsPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/set_all_graspsDie Definition des Typs
graspwird in Setzen von Greifpunkten beschrieben.Die Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "grasps": [ { "gripper_id": "string", "id": "string", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "priority": "int8", "replication": { "max_x_deg": "float64", "min_x_deg": "float64", "origin": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "step_x_deg": "float64" }, "template_id": "string" } ], "template_id": "string" } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "set_all_grasps", "response": { "return_code": { "message": "string", "value": "int16" } } }
get_grasps¶
gibt alle definierten Greifpunkte mit den angegebenen IDs (
grasp_ids) zurück, die zu den Templates mit den angegebenentemplate_idsgehören.Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/get_graspsPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/get_graspsWenn keine
grasp_idsangegeben werden, werden alle Greifpunkte zu den angegebenentemplate_idszurückgeliefert. Wenn keinetemplate_idsangegeben werden, werden alle Greifpunkte mit den gefordertengrasp_idszurückgeliefert. Wenn gar keine IDs angegeben werden, werden alle gespeicherten Greifpunkte zurückgeliefert.Die Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "grasp_ids": [ "string" ], "template_ids": [ "string" ] } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "get_grasps", "response": { "grasps": [ { "gripper_id": "string", "id": "string", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "priority": "int8", "replication": { "max_x_deg": "float64", "min_x_deg": "float64", "origin": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "step_x_deg": "float64" }, "template_id": "string" } ], "return_code": { "message": "string", "value": "int16" } } }
delete_grasps¶
löscht alle Greifpunkte mit den angegebenen
grasp_ids, die zu den Templates mit den angegebenentemplate_idsgehören.Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/delete_graspsPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/delete_graspsWenn keine
grasp_idsangegeben werden, werden alle Greifpunkte gelöscht, die zu den Templates mit den angegebenentemplate_idsgehören. Die Listetemplate_idsdarf nicht leer sein.Die Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "grasp_ids": [ "string" ], "template_ids": [ "string" ] } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "delete_grasps", "response": { "return_code": { "message": "string", "value": "int16" } } }
get_symmetric_grasps¶
gibt alle Greifpunkte zurück, die symmetrisch zum angegebenen Greifpunkt sind.
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_silhouettematch/services/get_symmetric_graspsPUT http://<host>/api/v1/nodes/rc_silhouettematch/services/get_symmetric_graspsDie Definition des Typs
graspwird in Setzen von Greifpunkten beschrieben.Die Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "grasp": { "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "replication": { "max_x_deg": "float64", "min_x_deg": "float64", "origin": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "step_x_deg": "float64" }, "template_id": "string" } } }Der erste Greifpunkt in der Rückgabeliste ist derselbe, der dem Service übergeben wurde. Wenn das Template keine exakte Symmetrie hat, wird nur der übergebene Greifpunkt zurückgeliefert. Wenn das Template eine kontinuierliche Symmetrie hat (z.B. ein zylindrisches Objekt), werden nur 12 gleichverteilte Greifpunkte zurückgeliefert.
Die Definition des Typs
graspwird in Setzen von Greifpunkten beschrieben.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "get_symmetric_grasps", "response": { "grasps": [ { "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "replication": { "max_x_deg": "float64", "min_x_deg": "float64", "origin": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "step_x_deg": "float64" }, "template_id": "string" } ], "return_code": { "message": "string", "value": "int16" } } }
Rückgabecodes¶
Zusätzlich zur eigentlichen Serviceantwort gibt jeder Service einen sogenannten return_code bestehend aus einem Integer-Wert und einer optionalen Textnachricht zurück. Erfolgreiche Service-Anfragen werden mit einem Wert von 0 quittiert. Positive Werte bedeuten, dass die Service-Anfrage zwar erfolgreich bearbeitet wurde, aber zusätzliche Informationen zur Verfügung stehen. Negative Werte bedeuten, dass Fehler aufgetreten sind.
| Code | Beschreibung |
|---|---|
| 0 | Erfolgreich |
| -1 | Ungültige(s) Argument(e) |
| -3 | Ein interner Timeout ist aufgetreten, beispielsweise während der Objekterkennung. |
| -4 | Die maximal erlaubte Zeitspanne für die interne Akquise der Bilddaten wurde überschritten. |
| -7 | Daten konnten nicht in den persistenten Speicher geschrieben oder vom persistenten Speicher gelesen werden. |
| -8 | Das Modul befindet sich in einem Zustand, in welchem dieser Service nicht aufgerufen werden kann. Beispielsweise kann detect_object nicht aufgerufen werden, solange keine Kalibrierung der Basisebene durchgeführt wurde. |
| -10 | Das neue Element konnte nicht hinzugefügt werden, da die maximal speicherbare Anzahl an ROIs oder Templates überschritten wurde. |
| -100 | Ein interner Fehler ist aufgetreten. |
| -101 | Die Erkennung der Basisebene schlug fehl. |
| -102 | Die Hand-Auge-Kalibrierung hat sich seit der letzten Kalibrierung der Basisebene verändert. |
| -104 | Die Verkippung zwischen der Basisebene und der Sichtachse der Kamera überschreitet das 10-Grad-Limit. |
| 10 | Die maximale Anzahl an ROIs oder Templates wurde erreicht. |
| 11 | Ein bestehendes Element wurde überschrieben. |
| 100 | Die angefragten Load Carrier wurden in der Szene nicht gefunden. |
| 101 | Keiner der Greifpunkte ist erreichbar. |
| 102 | Der detektierte Load Carrier ist leer. |
| 103 | Alle berechneten Greifpunkte sind in Kollision. |
| 107 | Die Basisebene wurde nicht zur aktuellen Kamerapose transformiert, z.B. weil keine Roboterpose während der Kalibrierung der Basisebene angegeben wurde. |
| 108 | Das Template ist überholt. |
| 109 | Die Ebene für die Objekterkennung passt nicht zum Load Carrier, z.B. liegen die Objekte unterhalb des Load Carrier Bodens. |
| 151 | Das Objekt-Template hat eine kontinuierliche Symmetrie. |
| 999 | Zusätzliche Hinweise für die Anwendungsentwicklung |
Template API¶
Für den Upload, Download, das Auflisten und Löschen von Templates werden spezielle REST-API-Endpunkte zur Verfügung gestellt. Templates können auch über die Web GUI hoch- und runtergeladen werden. Die Templates beinhalten die Greifpunkte, falls Greifpunkte konfiguriert wurden. Bis zu 50 Templates können gleichzeitig auf dem rc_visard gespeichert werden.
-
GET/templates/rc_silhouettematch¶ listet alle rc_silhouettematch-Templates auf.
Musteranfrage
GET /api/v2/templates/rc_silhouettematch HTTP/1.1
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json [ { "id": "string" } ]
Antwort-Header: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabewert: Array der Templates)
- 404 Not Found – Modul nicht gefunden
Referenzierte Datenmodelle:
-
GET/templates/rc_silhouettematch/{id}¶ ruft ein rc_silhouettematch-Template ab. Falls der angefragte Content-Typ application/octet-stream ist, wird das Template als Datei zurückgegeben.
Musteranfrage
GET /api/v2/templates/rc_silhouettematch/<id> HTTP/1.1
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "id": "string" }
Parameter: - id (string) – ID des Templates (obligatorisch)
Antwort-Header: - Content-Type – application/json application/octet-stream
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabewert: Template)
- 404 Not Found – Modul oder Template wurden nicht gefunden.
Referenzierte Datenmodelle:
-
PUT/templates/rc_silhouettematch/{id}¶ erstellt oder aktualisiert ein rc_silhouettematch-Template.
Musteranfrage
PUT /api/v2/templates/rc_silhouettematch/<id> HTTP/1.1 Accept: multipart/form-data application/json
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "id": "string" }
Parameter: - id (string) – ID des Templates (obligatorisch)
Formularparameter: - file – Template-Datei oder DXF-Datei (obligatorisch)
- object_height – Objekthöhe in Metern, benötigt bei DXF-Upload (optional)
- units – Einheit für DXF Datei falls nicht in Datei enthalten (mögliche Werte:
mm,cm,m,in,ft) (optional)
Anfrage-Header: - Accept – multipart/form-data application/json
Antwort-Header: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabewert: Template)
- 400 Bad Request – Template ist ungültig oder die maximale Zahl an Templates wurde erreicht.
- 403 Forbidden – Verboten, z.B. weil keine gültige Lizenz für das SilhouetteMatch-Modul vorliegt.
- 404 Not Found – Modul oder Template wurden nicht gefunden.
- 413 Request Entity Too Large – Template ist zu groß.
Referenzierte Datenmodelle:
-
DELETE/templates/rc_silhouettematch/{id}¶ entfernt ein rc_silhouettematch-Template.
Musteranfrage
DELETE /api/v2/templates/rc_silhouettematch/<id> HTTP/1.1 Accept: application/json
Parameter: - id (string) – ID des Templates (obligatorisch)
Anfrage-Header: - Accept – application/json
Antwort-Header: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung
- 403 Forbidden – Verboten, z.B. weil keine gültige Lizenz für das SilhouetteMatch-Modul vorliegt.
- 404 Not Found – Modul oder Template wurden nicht gefunden.