Hardware-Spezifikation¶
Bemerkung
Die folgenden Hardware-Spezifikationen sind als allgemeine Richtlinie angegeben. Das Produkt kann hiervon abweichen.
Lieferumfang¶
Der Lieferumfang eines rc_visard umfasst üblicherweise lediglich den rc_visard-Sensor und die Kurzanleitung. Das Handbuch liegt in digitaler Form vor, ist im Sensor hinterlegt und lässt sich zudem über die Web GUI oder über die Roboception-Homepage http://www.roboception.com/documentation aufrufen.
Bemerkung
Folgende Elemente sind, sofern nicht anders angegeben, NICHT im Lieferumfang enthalten:
- Kupplungen, Adapter, Halterungen,
- Netzteil, Kabel und Sicherungen,
- Netzwerkkabel.
In Abschnitt Zubehör ist angegeben, welche Kabelanbieter empfohlen werden.
Für den rc_visard ist ein Anschlussset verfügbar. Dieses Set umfasst das M12/RJ45-Netzwerkkabel, ein 24-V-Netzteil und einen DC/M12-Adapter. Für nähere Informationen siehe Zubehör.
Bemerkung
Das Anschlussset ist lediglich für die Ersteinrichtung, nicht jedoch für die dauerhafte Installation im industriellen Umfeld gedacht.
Das folgende Bild zeigt die wichtigsten Bauteile des rc_visard, auf die in diesem Handbuch Bezug genommen wird.
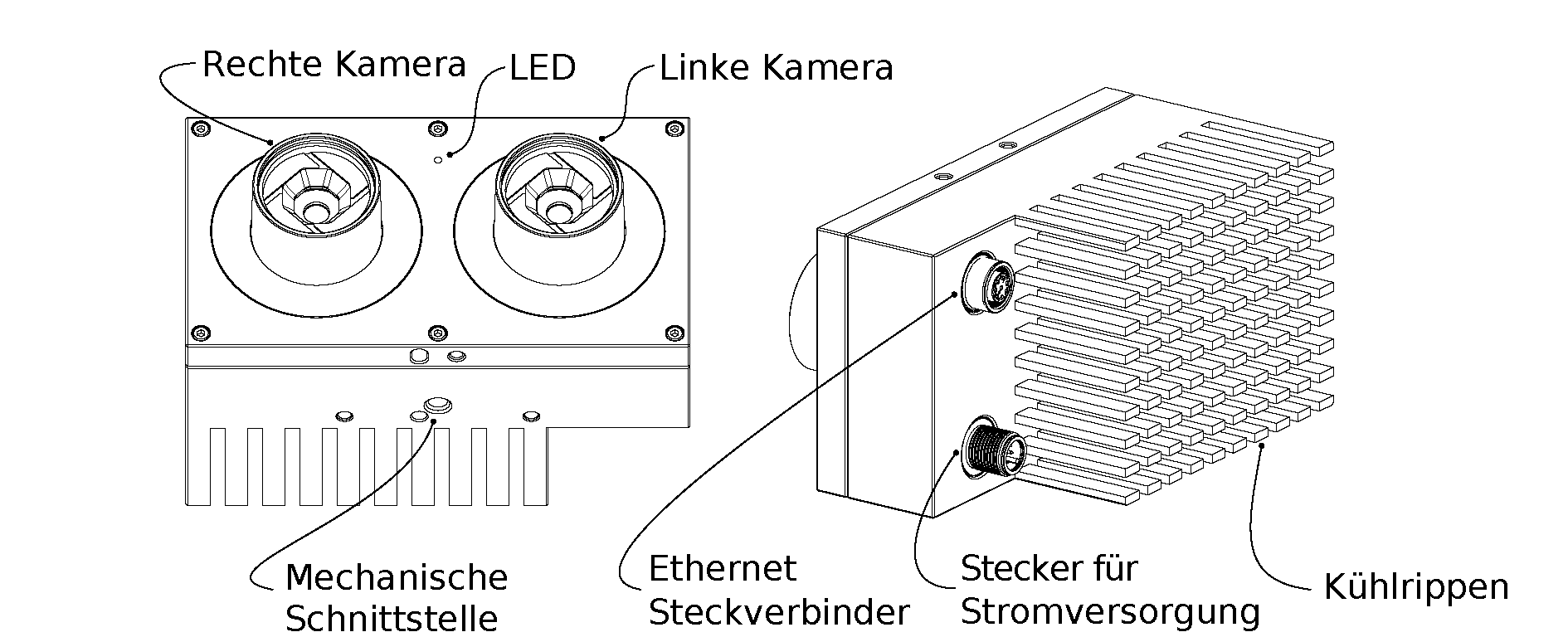
Abb. 2 Beschreibung der Bauteile
Technische Spezifikation¶
Tab. 1 enthält die gemeinsame technische Spezifikation für alle rc_visard-Varianten. Der rc_visard 160 ist mit zwei Arten von Objektiven erhältlich: 4 mm und 6 mm Brennweite. Der rc_visard 65 ist nur mit 4 mm Objektiven erhältlich.
| rc_visard 65 / rc_visard 160 | |
|---|---|
| Bildauflösung | 1280 x 960 Pixel, farbig oder monochrom |
| Sichtfeld | 4 mm Objektiv: Horizontal: 61°, Vertikal: 48°
6 mm Objektiv: Horizontal: 43°, Vertikal: 33°
|
| IR Filter | 650 nm |
| Tiefenbild (Auflösung) | 1280 x 960 pixel (Full) bei 1 Hz (mit StereoPlus-Lizenz)
640 x 480 Pixel (High) bei 3 Hz
320 x 240 Pixel (Medium) bei 15 Hz
214 x 160 Pixel (Low) bei 25 Hz
|
| Eigenbewegung | 200 Hz, geringe Latenz |
| GPU/CPU | Nvidia Tegra K1 |
| Stromversorgung | 18–30 V |
| Kühlung | Passiv |
Der rc_visard 65 und der rc_visard 160 unterscheiden sich in ihren Basisabständen, was sich einerseits auf den Tiefenmessbereich und die Auflösung und andererseits auf die Größe und das Gewicht des Sensors auswirkt.
| rc_visard 65 | rc_visard 160 | |
|---|---|---|
| Basisabstand | 65 mm | 160 mm |
| Tiefenmessbereich | 0,2 m bis unendlich | 0,5 m bis unendlich |
| Abmessungen (B x H x L) | 135 mm x 75 mm x 96 mm | 230 mm x 75 mm x 84 mm |
| Gewicht | 0,68 kg | 0,84 kg |
Die Kombination der Basisabstände und Objektive führt zu verschiedenen Auflösungen und Genauigkeiten.
| Abstand (mm) | rc_visard 65-4 | rc_visard 160-4 | rc_visard 160-6 | |
|---|---|---|---|---|
| laterale Auflösung (mm) | 200
500
1000
2000
3000
|
0.2
0.5
0.9
1.9
2.8
|
-
0.5
0.9
1.9
2.8
|
-
0.3
0.6
1.3
1.9
|
| Tiefenauflösung (mm) | 200
500
1000
2000
3000
|
0.04
0.2
0.9
3.6
8.0
|
-
0.1
0.4
1.5
3.3
|
-
0.06
0.3
1.0
2.2
|
| Mittlere Tiefengenauigkeit (mm) | 200
500
1000
2000
3000
|
0.2
0.9
3.6
14.2
32.1
|
-
0.4
1.5
5.8
13.0
|
-
0.3
1.0
3.9
8.8
|
Der rc_visard kann für zusätzliche Funktionalitäten mit On-Board-Softwaremodulen, wie z.B. SLAM, ausgestattet werden. Diese Softwaremodule können bei Roboception bestellt werden und benötigen ein Lizenz-Update.
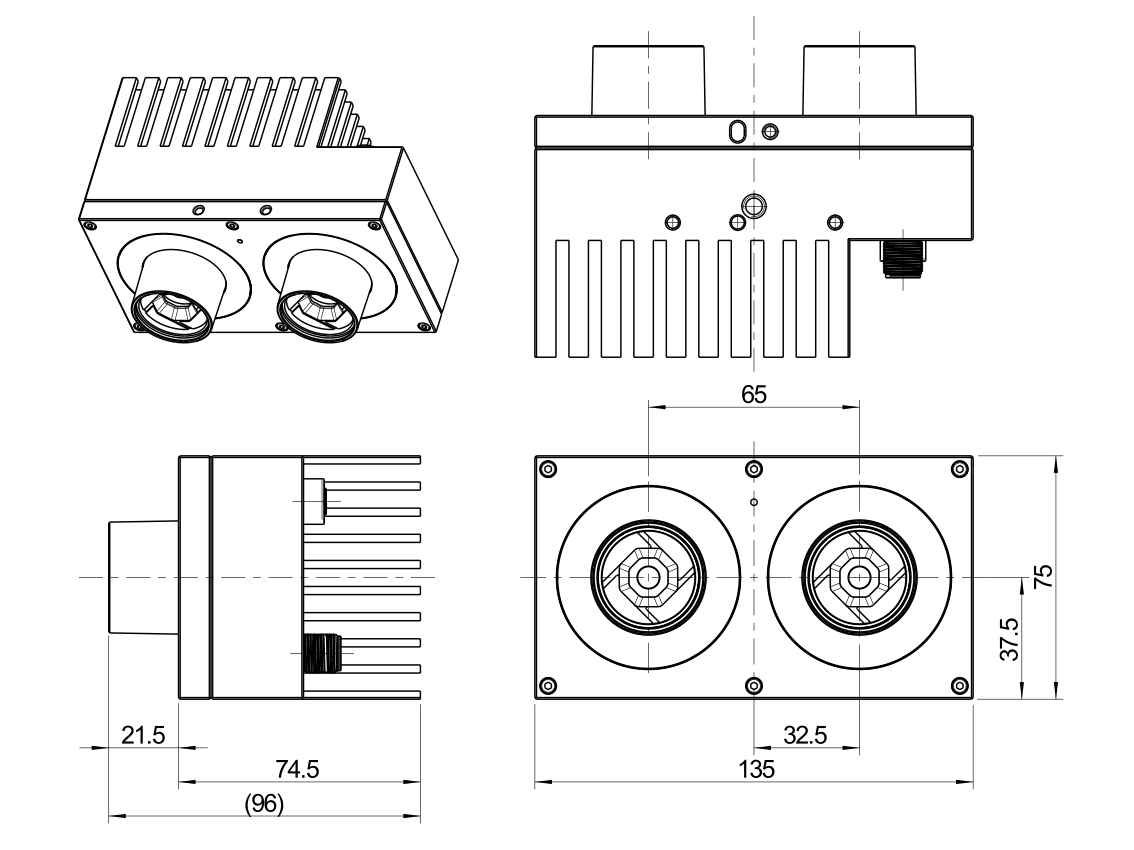
Abb. 3 Abmessungen des rc_visard 65
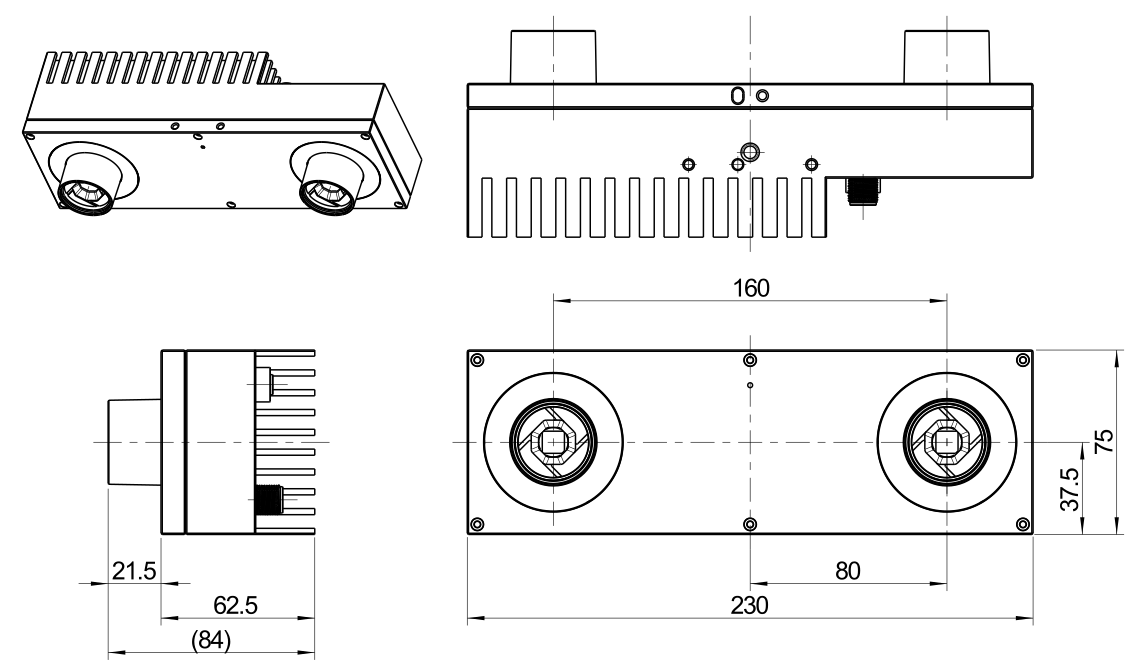
Abb. 4 Abmessungen des rc_visard 160
CAD-Modelle des rc_visard können von der Roboception-Homepage heruntergeladen werden: http://www.roboception.com/download. Die CAD-Modelle werden nach bestem Wissen und Gewissen, aber ohne Garantie für die Richtigkeit bereitgestellt. Wird als Materialeigenschaft Aluminium zugewiesen (Dichte: \(2.76\mathrm{g\over{cm}^3}\)), weicht das CAD-Modell in Bezug auf Gewicht und Massenschwerpunkt nicht mehr als fünf Prozent und in Bezug auf das Trägheitsmoment nicht mehr als zehn Prozent vom Produkt ab.
Umwelt- und Betriebsbedingungen¶
Der rc_visard ist für industrielle Anwendungen konzipiert worden. Die in Tab. 4 angegebenen Umweltbedingungen für die Lagerung, den Transport und den Betrieb sind ausnahmslos einzuhalten.
| rc_visard 65 / rc_visard 160 | |
|---|---|
| Lager-/Transporttemperatur | -25–70 °C |
| Betriebstemperatur | 0–50 °C |
| Relative Feuchte (nicht kondensierend) | 20–80 % |
| Schwingungen | 5 g |
| Erschütterungen | 50 g |
| Schutzklasse | IP 54 |
| Sonstiges |
|
Der rc_visard ist für den Betrieb bei einer Umgebungstemperatur zwischen 0 und 50 °C ausgelegt und arbeitet mit konvektiver (passiver) Kühlung. Während der Verwendung muss, insbesondere im Bereich der Kühlrippen, ein ungehinderter Luftstrom sichergestellt sein. Der rc_visard sollte nur mithilfe der vorgesehenen mechanischen Montageschnittstelle montiert werden. Kein Teil des Gehäuses darf während des Betriebs abgedeckt werden. Das Gehäuse muss in alle Richtungen mindestens zehn Zentimeter Abstand zu angrenzenden Elementen haben und es ist ein ausreichender Luftaustausch mit der Umgebung nötig, um eine angemessene Kühlung sicherzustellen. Die Kühlrippen müssen frei von Schmutz und anderen Verunreinigungen gehalten werden.
Die Gehäusetemperatur richtet sich nach der Verarbeitungslast, der Sensororientierung und der Umgebungstemperatur. Erreichen die frei liegenden Gehäuseflächen des Sensors eine Temperatur von mehr als 60 °C, wechselt die LED von Grün auf Rot.
Warnung
Für handgeführte Anwendungen sollte ein wärmeisolierter Griff am Sensor angebracht werden. So wird das bei Kontakt mit der 60 °C heißen Oberfläche bestehende Risiko für Brandverletzungen reduziert.
Spezifikationen für die Stromversorgung¶
Der rc_visard muss an eine Gleichspannungsquelle angeschlossen werden. Der Lieferumfang des rc_visard umfasst standardmäßig kein Netzteil. Das im Anschlussset enthaltene Netzteil kann für die Ersteinrichtung verwendet werden. Der Kunde ist dafür verantwortlich, bei einer dauerhaften Installation für eine geeignete Gleichspannungsquelle zu sorgen. Jeder rc_visard muss an eine eigene Stromquelle angeschlossen werden. Der Anschluss an ein Gebäudenetz darf nur über ein Netzteil erfolgen, das gemäß EN55011 Klasse B zertifiziert ist.
| Minimum | Bemessungswert | Maximum | |
|---|---|---|---|
| Versorgungsspannung | 18 V | 24 V | 30 V |
| Max. Leistungsaufnahme | 25 W | ||
| Überstromschutz | Schutz der Stromversorgung mit einer 2-A-Sicherung | ||
| Erfüllung der EMV-Anforderungen | siehe Normen | ||
Warnung
Die Überschreitung der maximalen Bemessungswerte kann zu Schäden am rc_visard, am Netzteil und an angeschlossener Ausrüstung führen.
Warnung
Jeder rc_visard muss von einem eigenen Netzteil versorgt werden.
Warnung
Der Anschluss an das Gebäudenetz darf nur über Netzteile erfolgen, die gemäß EN 55011 als Gerät der Klasse B zertifiziert sind.
Verkabelung¶
Die Kabel sind nicht im Standardlieferumfang des rc_visard enthalten. Es obliegt dem Kunden, geeignete Kabel zu beschaffen. In Zubehör ist eine Übersicht über die empfohlenen Komponenten enthalten.
Warnung
Die Richtlinien zum Kabelmanagement sind zwingend einzuhalten. Kabel sind immer mit einer Zugentlastung an der Halterung des rc_visard zu befestigen, sodass durch Kabelbewegungen keine Kräfte auf die M12-Anschlüsse des rc_visard wirken. Die verwendeten Kabel müssen lang genug sein, damit sich der rc_visard voll bewegen kann, ohne dass das Kabel zu stark belastet wird. Der minimale Biegeradius des Kabels muss beachtet werden.
Der rc_visard besitzt eine industrielle, achtpolige M12-Buchse (A-kodiert) für die Ethernet-Verbindung und einen achtpoligen M12-Stecker (A-kodiert) für den Stromanschluss und die GPIO-Konnektivität. Beide Anschlüsse befinden sich an der Rückwand des Geräts. Ihre Position (Abstand von Mittellinien) ist beim rc_visard 65 und beim rc_visard 160 identisch. Die Lage der beiden Anschlüsse wird am Beispiel des rc_visard 65 in Abb. 5 dargestellt.
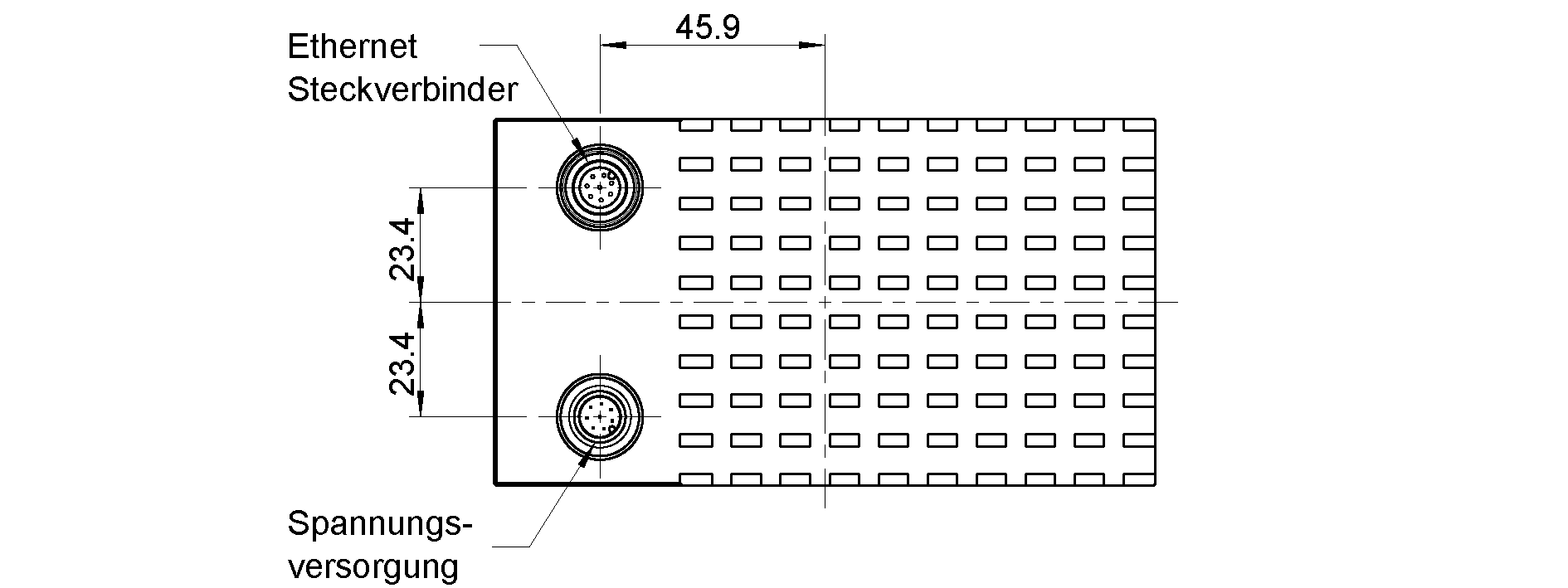
Abb. 5 Lage der elektrischen Anschlüsse des rc_visard 65 für die Ethernetverbindung (oben) und die Stromversorgung (unten)
Die Anschlüsse sind so gedreht, dass die üblicherweise 90° abgewinkelten Stecker horizontal abgehen und von der Kamera (und den Kühlrippen) wegzeigen.
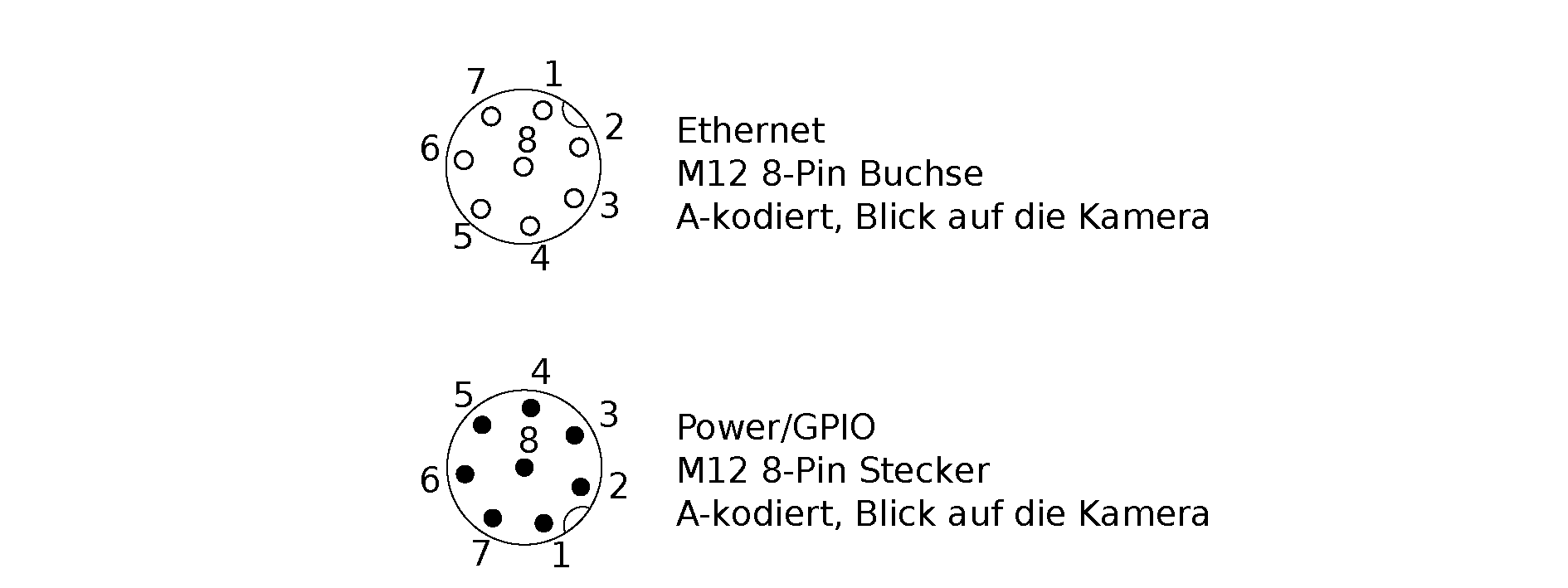
Abb. 6 Steckerbelegung für den Strom- und Ethernetanschluss
Die Steckerbelegung für den Ethernetanschluss ist in Abb. 7 angegeben.
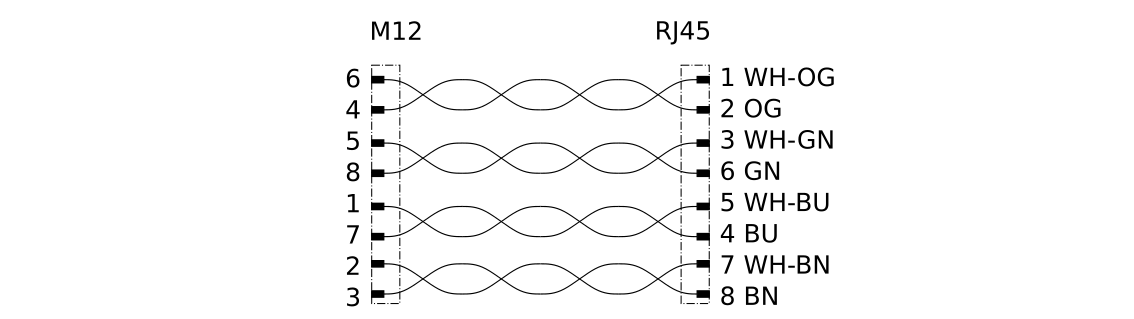
Abb. 7 Steckerbelegung für die M12/Ethernet-Verkabelung
Die Steckerbelegung für den Stromanschluss ist in Tab. 6 angegeben.
| Pos. | Belegung |
|---|---|
| 1 | GPIO Eingang 2 |
| 2 | Stromzufuhr |
| 3 | GPIO Eingang 1 |
| 4 | GPIO Masse |
| 5 | GPIO Vcc |
| 6 | GPIO Ausgang 1 (Bildbelichtung) |
| 7 | Masse |
| 8 | GPIO Ausgang 2 |
Die GPIO-Signale werden über Optokoppler entkoppelt. GPIO Ausgang 1 bietet standardmäßig ein Signal zur Belichtungssynchronisierung und hat für die Dauer der Belichtung einen logischen HIGH-Pegel. Alle GPIOs können über das IOControl-Modul kontrolliert werden (IOControl und Projektor-Kontrolle). Pins von unbenutzten GPIOs sollten ungeerdet bleiben.
Warnung
Es ist besonders wichtig, dass GPIO Eingang 1 während des Boot-Vorgangs ungeerdet oder auf LOW gesetzt ist. Der rc_visard fährt nicht hoch, wenn der Pin während des Boot-Vorgangs auf HIGH gesetzt ist.
Das GPIO-Schaltschema und die zugehörigen Spezifikationen sind in Abb. 8 angegeben. Die maximale Spannung für GPIO Eingang und GPIO Vcc beträgt 30 V.
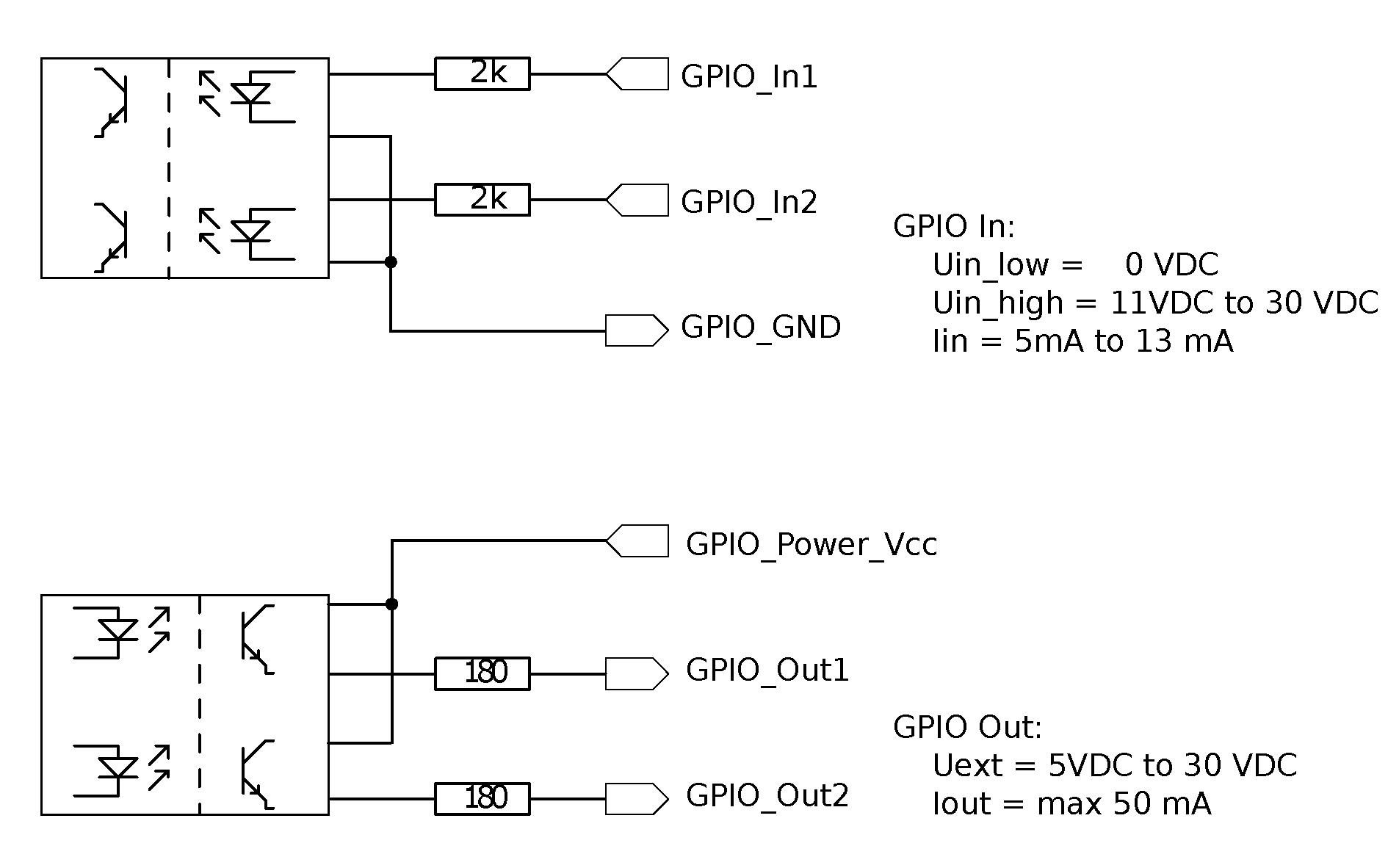
Abb. 8 GPIO-Schaltschema und zugehörige Spezifikationen: Keine Signale über 30 V anschließen!
Warnung
Schließen Sie keine Signale mit Spannungen über 30 V an den rc_visard an.
Mechanische Schnittstelle¶
Der rc_visard 65 und der rc_visard 160 verfügen an der Unterseite über eine identische Montageschnittstelle.
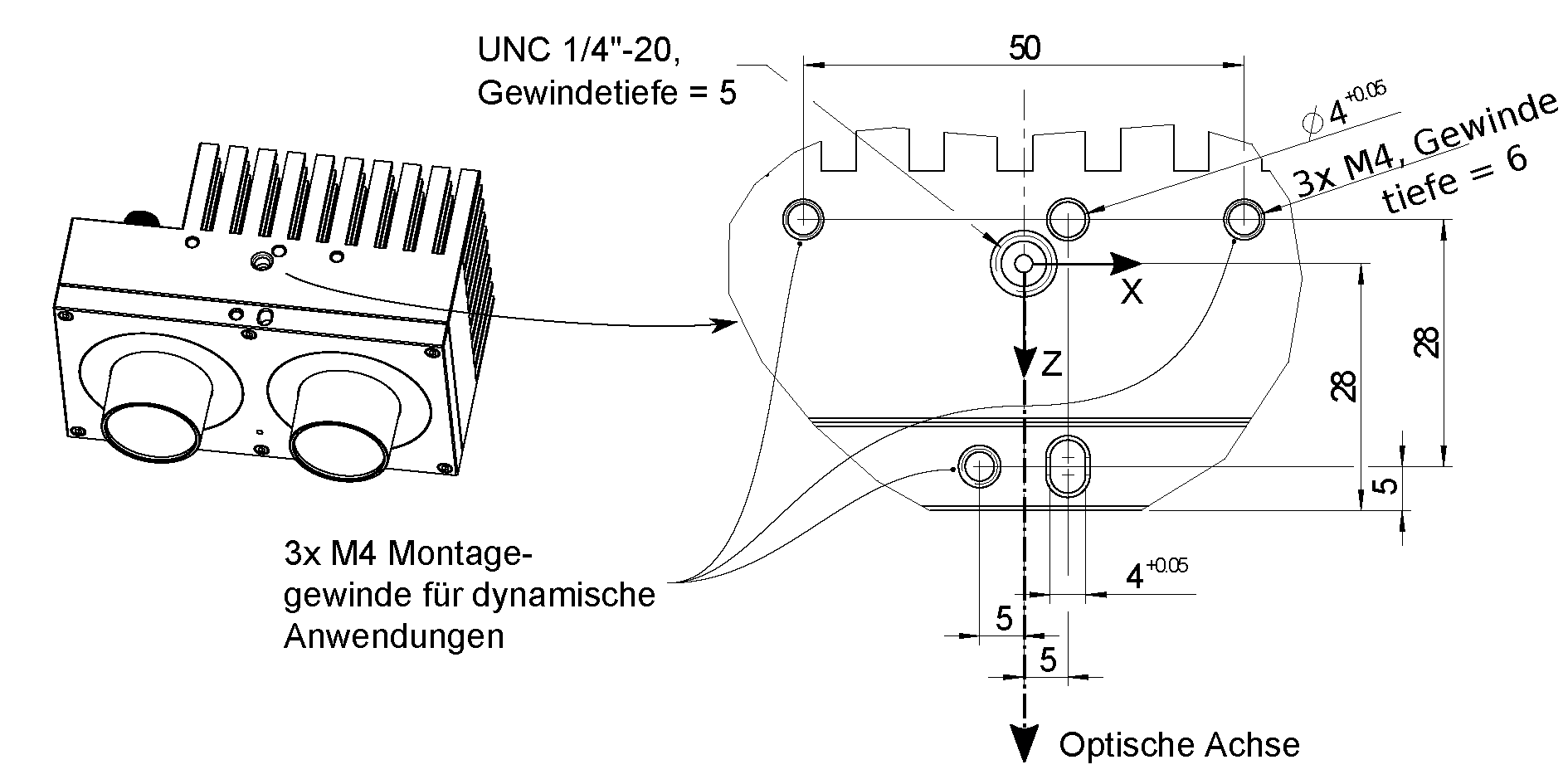
Abb. 9 Montagepunkt für den Anschluss des rc_visard an Roboter oder andere Vorrichtungen
Zur Fehlerbehebung sowie zu Konfigurationszwecken kann der Sensor über die am Koordinatenursprung angegebene, genormte Stativaufnahme (Gewinde: 1/4 Zoll x 20) montiert werden. Für dynamische Anwendungen, wie für die Montage an einem Roboterarm, muss der Sensor mit drei M4-8.8-Maschinenschrauben befestigt werden, die mit einem Drehmoment von 2,5 Nm anzuziehen und mit einer mittelfesten Gewindesicherung, wie Loctite 243, zu sichern sind. Die maximale Einschraubtiefe beträgt 6 mm. Die beiden Löcher mit einem Durchmesser von 4 mm können für Positionsstifte (ISO 2338 4 m6) verwendet werden, damit der Sensor präzise positioniert wird.
Warnung
Für dynamische Anwendungen muss der rc_visard mit drei M4-8.8-Maschinenschrauben befestigt werden, die mit einem Drehmoment von 2,5 Nm anzuziehen und mit einer mittelfesten Gewindesicherung zu sichern sind. Es dürfen keine hochfesten Schrauben verwendet werden. Die Einschraubtiefe muss wenigstens 5 mm betragen.
Koordinatensysteme¶
Der Ursprung des rc_visard-Koordinatensystems liegt in der Austrittspupille der linken Kameralinse. Dieses System wird auch als Sensor- oder Kamerakoordinatensystem bezeichnet. Die ungefähre Lage für den rc_visard 65 wird auf dem nächsten Bild gezeigt.
Bemerkung
Der korrekte Versatz zwischen dem Sensor-/Kamerakoordinatensystem und einem Roboterkoordinatensystem kann über die Hand-Auge Kalibrierung bestimmt werden.
Das Montagepunkt-Koordinatensystem für beide rc_visard-Geräte sitzt an der Unterseite, zentriert auf dem Gewinde, wobei die Ausrichtung der des Sensor-Koordinatensystems entspricht. Abb. 10 zeigt den ungefähren Versatz.
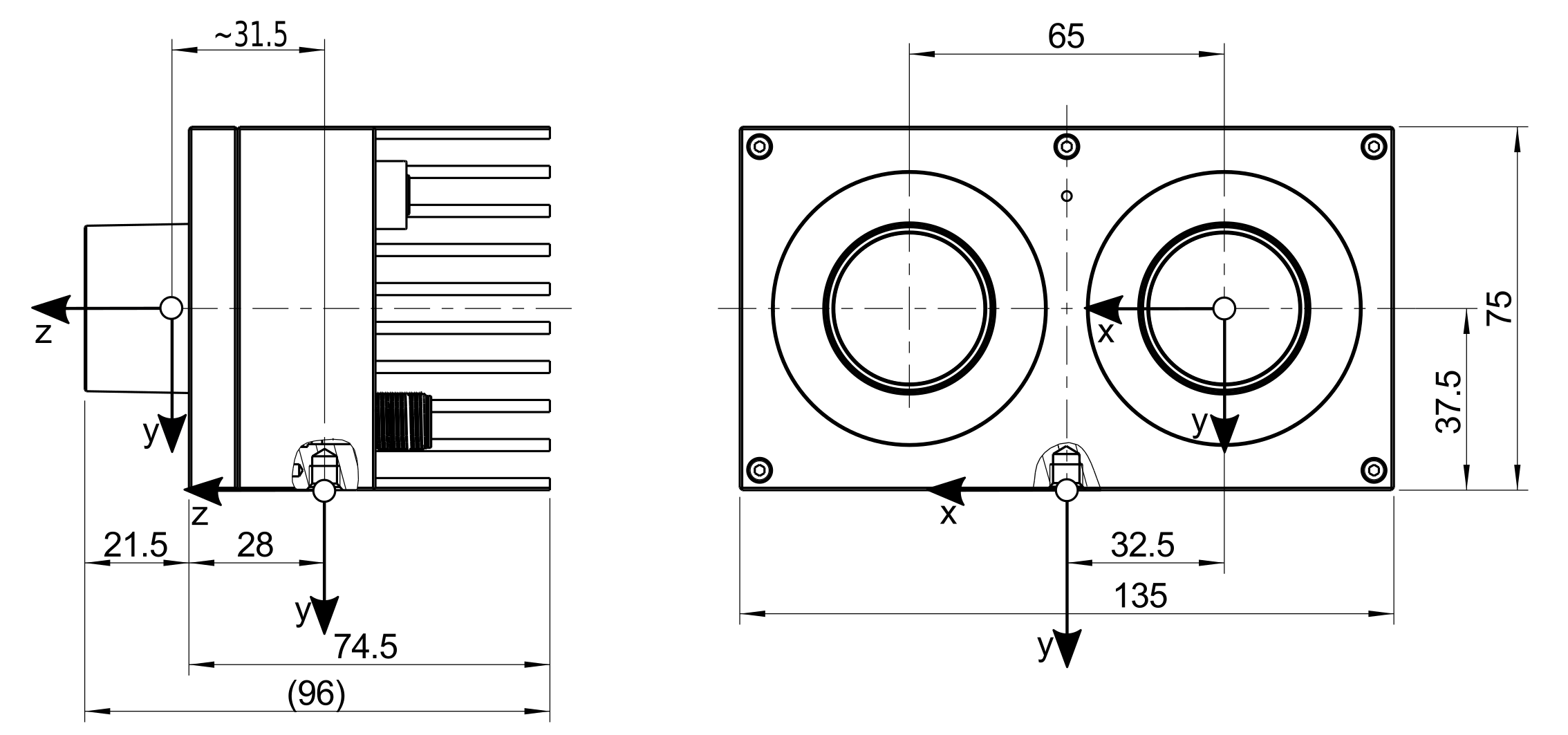
Abb. 10 Ungefähre Position des Sensor-/Kamerakoordinatensystems (in der linken Kameralinse) und des Montagepunkt-Koordinatensystems (am Stativgewinde) für den rc_visard 65
Die ungefähre Position des Sensor-/Kamerakoordinatensystems und des Montagepunkt-Koordinatensystems für den rc_visard 160 ist in Abb. 11 angegeben.
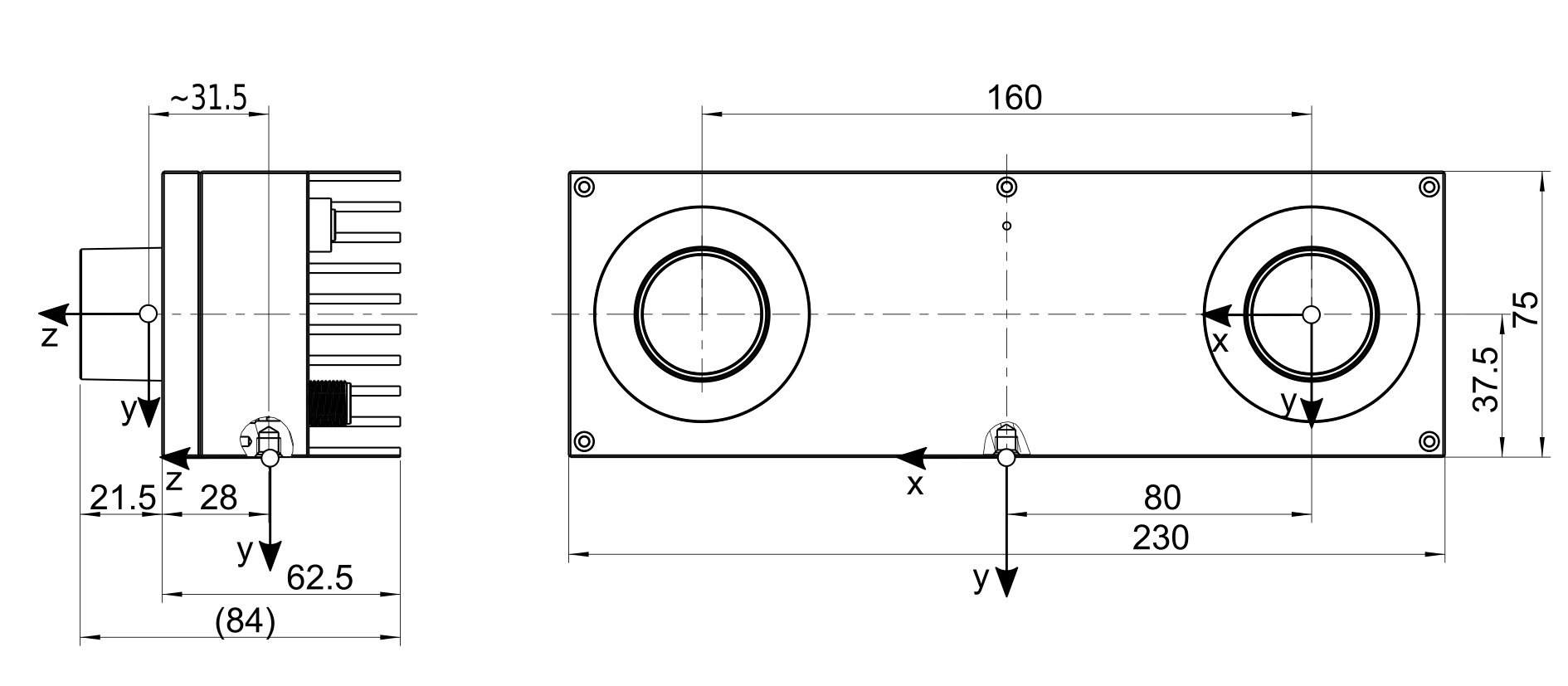
Abb. 11 Ungefähre Position des Sensor-/Kamerakoordinatensystems (in der linken Kameralinse) und des Montagepunkt-Koordinatensystems (am Stativgewinde) für den rc_visard 160