REST-API-Schnittstelle¶
Neben der GenICam-Schnittstelle bietet der rc_visard eine umfassende RESTful-Web-Schnittstelle (REST-API), auf die jeder HTTP-Client und jede HTTP-Bibliothek zugreifen kann. Während die meisten Parameter, Services und Funktionen auch über die benutzerfreundliche Web GUI zugänglich sind, dient die REST-API eher als Maschine-Maschine-Schnittstelle für folgende programmgesteuerte Aufgaben:
- Setzen und Abrufen der Laufzeitparameter der Softwaremodule, z. B. der Stereokamera, der Disparitätsberechnung und der visuellen Odometrie;
- Aufrufen von Services, z. B. zum Starten und Stoppen einzelner Softwaremodule, oder zum Nutzen spezieller Funktionen, wie der Hand-Auge-Kalibrierung;
- Konfiguration von Datenströmen, die, wie in der rc_dynamics Schnittstelle beschrieben, die dynamischen Zustandsschätzungen des rc_visard bereitstellen;
- Abruf des aktuellen Systemstatus und des Status einzelner Softwaremodule; sowie
- Aktualisierung der Firmware des rc_visard oder seiner Lizenz.
Hinweis
In der REST-API des rc_visard bezeichnet der Begriff node ein Softwaremodul, das gewisse algorithmische Funktionen bündelt und eine ganzheitliche Benutzeroberfläche (Parameter, Services, aktueller Status) besitzt. Beispiele für solche Module sind das Stereo-Matching-Modul oder das Modul der visuellen Odometrie.
Allgemeine Struktur der Programmierschnittstelle (API)¶
Der allgemeine Einstiegspunkt zur Programmierschnittstelle (API) des rc_visard ist http://<rcvisard>/api/ wobei <rcvisard> entweder die IP-Adresse des Geräts ist oder sein dem jeweiligen DHCP-Server bekannter Host-Name (siehe Netzwerkkonfiguration). Greift der Benutzer über einen Webbrowser auf diese Adresse zu, kann er die Programmierschnittstelle während der Laufzeit mithilfe der Swagger UI erkunden und testen.
Für die eigentlichen HTTP-Anfragen wird dem Einstiegspunkt der Programmierschnittstelle die aktuelle Version der Schnittstelle als Postfix angehangen, d. h. http://<rcvisard>/api/v1. Alle Daten, die an die REST-API gesandt und von ihr empfangen werden, entsprechen dem JSON-Datenformat (JavaScript Object Notation). Die Programmierschnittstelle ist so gestaltet, dass der Benutzer die in Verfügbare Ressourcen und Anfragen aufgelisteten sogenannten Ressourcen über die folgenden HTTP-Anforderungen anlegen, abrufen, ändern und löschen kann.
| Anfragetyp | Beschreibung |
|---|---|
| GET | Zugriff auf eine oder mehrere Ressourcen und Rückgabe des Ergebnisses im JSON-Format |
| PUT | Änderung einer Ressource und Rückgabe der modifizierten Ressource im JSON-Format |
| DELETE | Löschen einer Ressource |
| POST | Upload einer Datei (z. B. einer Lizenz oder eines Firmware-Images) |
Je nach der Art der Anfrage und Datentyp können die Argumente für HTTP-Anfragen als Teil des Pfads (URI) zur Ressource, als Abfrage-Zeichenfolge, als Formulardaten oder im Body der Anfrage übertragen werden. Die folgenden Beispiele nutzen das Kommandozeilenprogramm curl, das für verschiedene Betriebssysteme verfügbar ist. Siehe https://curl.haxx.se.
Abruf des aktuellen Status eines Moduls, wobei sein Name im Pfad (URI) verschlüsselt ist
curl -X GET 'http://<rcvisard>/api/v1/nodes/rc_stereomatching'Abruf einiger Parameterwerte eines Moduls über eine Abfragezeichenfolge
curl -X GET 'http://<rcvisard>/api/v1/nodes/rc_stereomatching/parameters?name=minconf&name=maxdepth'Konfiguration eines neuen Datenstroms, wobei die Zielparameter als Formulardaten übertragen werden
curl -X PUT --header 'Content-Type: application/x-www-form-urlencoded' -d 'destination=10.0.1.14%3A30000' 'http://<rcvisard>/api/v1/datastreams/pose'
Setzen eines Modulparameters als JSON-formatierter Text im Body der Anfrage
curl -X PUT --header 'Content-Type: application/json' -d '[{"name": "mindepth", "value": 0.1}]' 'http://<rcvisard>/api/v1/nodes/rc_stereomatching/parameters'
Zur Beantwortung solcher Anfragen greift die Programmierschnittstelle des rc_visard auf übliche Rückgabecodes zurück:
| Statuscode | Beschreibung |
|---|---|
200 OK |
Die Anfrage war erfolgreich. Die Ressource wird im JSON-Format zurückgegeben. |
400 Bad Request |
Ein für die API-Anfrage benötigtes Attribut oder Argument fehlt oder ist ungültig. |
404 Not Found |
Auf eine Ressource konnte nicht zugegriffen werden. Möglicherweise kann die ID einer Ressource nicht gefunden werden. |
403 Forbidden |
Der Zugriff ist (vorübergehend) verboten. Möglicherweise sind einige Parameter gesperrt, während eine GigE Vision-Anwendung verbunden ist. |
429 Too many requests |
Die Übertragungsrate ist aufgrund einer zu hohen Anfragefrequenz begrenzt. |
Der folgende Eintrag zeigt eine Musterantwort auf eine erfolgreiche Anfrage, mit der Informationen zum minconf-Parameter des rc_stereomatching-Moduls angefordert werden:
HTTP/1.1 200 OK
Content-Type: application/json
Content-Length: 157
{
"name": "minconf",
"min": 0,
"default": 0,
"max": 1,
"value": 0,
"type": "float64",
"description": "Minimum confidence"
}
Hinweis
Das tatsächliche Verhalten, die zulässigen Anfragen und die speziellen Rückgabecodes hängen in hohem Maße von der gewählten Ressource, vom Kontext und von der Aktion ab. Siehe die verfügbaren Ressourcen des rc_visard und einzelnen Parameter und Services jedes Softwaremoduls.
Verfügbare Ressourcen und Anfragen¶
Die für die REST-API verfügbaren Ressourcen lassen sich in folgende Teilbereiche gliedern:
/nodes: Zugriff auf die Softwaremodule des rc_visard mit ihren jeweiligen Laufzeitzuständen, Parametern und verfügbaren Services./datastreams: Zugriff auf die und Verwaltung der Datenströme der rc_dynamics-Schnittstelle (siehe Die rc_dynamics-Schnittstelle) des rc_visard./logs: Zugriff auf die im rc_visard hinterlegten Logdateien./system: Zugriff auf den Systemzustand und Verwaltung der Lizenzen sowie der Firmware-Updates.
Module, Parameter und Services¶
Die Softwaremodule des rc_visard heißen in der REST-API nodes und vereinen jeweils bestimmte algorithmische Funktionen. Über folgenden Befehl lassen sich alle Softwaremodule der REST-API mit ihren jeweiligen Services und Parametern auflisten:
curl -X GET http://<rcvisard>/api/v1/nodes
Informationen zu einem bestimmten Modul (z. B. rc_stereocamera) lassen sich mit folgendem Befehl abrufen:
curl -X GET http://<rcvisard>/api/v1/nodes/rc_stereocamera
- Status:
Während der Laufzeit stellt jedes Modul Informationen zu seinem aktuellen Status bereit. Dies umfasst nicht nur den aktuellen Verarbeitungsstatus des Moduls (z. B.
runningoderstale), sondern die meisten Module melden auch Laufzeitstatistiken oder schreibgeschützte Parameter, sogenannte Statuswerte. Die Statuswerte desrc_stereocamera-Moduls lassen sich beispielsweise wie folgt abrufen:curl -X GET http://<rcvisard>/api/v1/nodes/rc_stereocamera/status
Hinweis
Die zurückgegebenen Statuswerte sind modulspezifisch und werden im jeweiligen Softwaremodul dokumentiert.
Hinweis
Statuswerte werden nur gemeldet, wenn sich das jeweilige Modul im Zustand
runningbefindet.
- Parameter:
Die meisten Module stellen Parameter über die REST-API des rc_visard zur Verfügung, damit ihr Laufzeitverhalten an den Anwendungskontext oder die Anforderungen angepasst werden kann. Die REST-API ermöglicht es, den Wert eines Parameters zu setzen und abzufragen. Darüber hinaus stellt sie weitere Angaben, wie z. B. den jeweiligen Standardwert und zulässige Minimal- bzw. Maximalwerte von Parametern, zur Verfügung.
Die
rc_stereomatching-Parameter lassen sich beispielsweise wie folgt abrufen:curl -X GET http://<rcvisard>/api/v1/nodes/rc_stereomatching/parameters
Der
median-Parameter dieses Moduls könnte wie folgt auf den Wert 3 gesetzt werden:curl -X PUT --header 'Content-Type: application/json' -d '{ "value": 3 }' http://<rcvisard>/api/v1/nodes/rc_stereomatching/parameters/median
Hinweis
Laufzeitparameter sind modulspezifisch und werden in dem jeweiligen Softwaremodul dokumentiert.
Hinweis
Die meisten Parameter, die die Module über die REST-API anbieten, lassen sich auch über die benutzerfreundliche Web GUI des rc_visard erkunden und austesten.
Hinweis
Einige der Parameter, die über die REST-API des rc_visard bereitgestellt werden, sind auch über die GigE Vision 2.0/GenICam-Schnittstelle zugänglich. Die Einstellung dieser Parameter über die REST-API ist verboten, solange ein GenICam-Client verbunden ist.
Zudem bietet jedes Modul, das Laufzeitparameter bereitstellt, auch Services, um die aktuellen Parametereinstellungen zu speichern oder um die Werkseinstellungen aller Parameter wiederherzustellen.
- Services:
Einige Module bieten auch Services, die sich über die REST-API aufrufen lassen. Hierzu gehört beispielsweise das oben bereits genannte Speichern und Wiederherstellen von Parametern oder auch das Starten und Stoppen von Modulen. Die Services der Zustandsschätzung (siehe Stereo-INS) lassen sich beispielsweise wie folgt aufrufen:
curl -X GET http://<rcvisard>/api/v1/nodes/rc_stereo_ins/services
Um einen Service eines Moduls aufzurufen, wird eine
PUT-Anfrage mit servicespezifischen Argumenten für die jeweilige Ressource gestellt (siehe das"args"-Feld der Service-Datenmodell). Das Dynamik-Modul lässt sich beispielsweise wie folgt einschalten:curl -X PUT --header 'Content-Type: application/json' -d '{ "args": {} }' http://<rcvisard>/api/v1/nodes/rc_dynamics/services/start
Hinweis
Die Services und zugehörigen Argumente sind modulspezifisch und werden im jeweiligen Softwaremodul dokumentiert.
Die folgende Liste enthält alle REST-API-Anfragen zum Status des Moduls und seinen Parametern und Services:
-
GET/nodes¶ Abruf einer Liste aller verfügbaren Module.
Musteranfrage
GET /api/v1/nodes HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json [ { "name": "rc_stereocalib", "parameters": [ "grid_width", "grid_height", "snap" ], "services": [ "save_parameters", "reset_defaults", "change_state" ], "status": "stale" }, { "name": "rc_stereocamera", "parameters": [ "fps", "exp_auto", "exp_value", "exp_max" ], "services": [ "save_parameters", "reset_defaults" ], "status": "running" }, { "name": "rc_hand_eye_calibration", "parameters": [ "grid_width", "grid_height", "robot_mounted" ], "services": [ "save_parameters", "reset_defaults", "set_pose", "reset", "save", "calibrate", "get_calibration" ], "status": "stale" }, { "name": "rc_stereo_ins", "parameters": [], "services": [], "status": "stale" }, { "name": "rc_stereomatching", "parameters": [ "force_on", "quality", "disprange", "seg", "median", "fill", "minconf", "mindepth", "maxdepth", "maxdeptherr" ], "services": [ "save_parameters", "reset_defaults" ], "status": "running" }, { "name": "rc_stereovisodo", "parameters": [ "disprange", "nkey", "ncorner", "nfeature" ], "services": [ "save_parameters", "reset_defaults" ], "status": "stale" } ]
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: NodeInfo-Array)
Referenzierte Datenmodelle:
-
GET/nodes/{node}¶ Abruf von Informationen zu einem einzelnen Modul.
Musteranfrage
GET /api/v1/nodes/<node> HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "name": "rc_stereocamera", "parameters": [ "fps", "exp_auto", "exp_value", "exp_max" ], "services": [ "save_parameters", "reset_defaults" ], "status": "running" }
Parameter: - node (string) – Modulname (obligatorisch)
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: NodeInfo)
- 404 Not Found – Modul nicht gefunden
Referenzierte Datenmodelle:
-
GET/nodes/{node}/parameters¶ Abruf von Parametern eines Moduls.
Musteranfrage
GET /api/v1/nodes/<node>/parameters?name=<name> HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json [ { "default": 25, "description": "Frames per second in Hz", "max": 25, "min": 1, "name": "fps", "type": "float64", "value": 25 }, { "default": true, "description": "Switching between auto and manual exposure", "max": true, "min": false, "name": "exp_auto", "type": "bool", "value": true }, { "default": 0.007, "description": "Maximum exposure time in s if exp_auto is true", "max": 0.018, "min": 6.6e-05, "name": "exp_max", "type": "float64", "value": 0.007 } ]
Parameter: - node (string) – Modulname (obligatorisch)
Anfrageparameter: - name (string) – Schränkt Ergebnisse auf Parameter mit diesem Namen ein (optional).
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Parameter-Array)
- 404 Not Found – Modul nicht gefunden
Referenzierte Datenmodelle:
-
PUT/nodes/{node}/parameters¶ Aktualisierung mehrerer Parameter.
Musteranfrage
PUT /api/v1/nodes/<node>/parameters HTTP/1.1 Host: <rcvisard> Accept: application/json [ { "name": "string", "value": {} } ]
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json [ { "default": 25, "description": "Frames per second in Hz", "max": 25, "min": 1, "name": "fps", "type": "float64", "value": 10 }, { "default": true, "description": "Switching between auto and manual exposure", "max": true, "min": false, "name": "exp_auto", "type": "bool", "value": false }, { "default": 0.005, "description": "Manual exposure time in s if exp_auto is false", "max": 0.018, "min": 6.6e-05, "name": "exp_value", "type": "float64", "value": 0.005 } ]
Parameter: - node (string) – Modulname (obligatorisch)
JSON-Objekt-Array zur Anfrage: - parameters (Parameter) – Liste von Parametern (obligatorisch)
Anfrage-Header: - Accept – application/json
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Parameter-Array)
- 404 Not Found – Modul nicht gefunden
- 403 Forbidden – Aktualisierung des Parameters verboten, z. B. weil er aufgrund einer laufenden GigE Vision-Anwendung gesperrt ist oder keine valide Lizenz für diese Komponente vorliegt.
Referenzierte Datenmodelle:
-
GET/nodes/{node}/parameters/{param}¶ Abruf eines bestimmten Parameters eines Moduls.
Musteranfrage
GET /api/v1/nodes/<node>/parameters/<param> HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "default": "H", "description": "Quality, i.e. H, M or L", "max": "", "min": "", "name": "quality", "type": "string", "value": "H" }
Parameter: - node (string) – Modulname (obligatorisch)
- param (string) – Name des Parameters (obligatorisch)
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Parameter)
- 404 Not Found – Modul oder Parameter nicht gefunden
Referenzierte Datenmodelle:
-
PUT/nodes/{node}/parameters/{param}¶ Aktualisierung eines bestimmten Parameters eines Moduls.
Musteranfrage
PUT /api/v1/nodes/<node>/parameters/<param> HTTP/1.1 Host: <rcvisard> Accept: application/json { "name": "string", "value": {} }
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "default": "H", "description": "Quality, i.e. H, M or L", "max": "", "min": "", "name": "quality", "type": "string", "value": "M" }
Parameter: - node (string) – Modulname (obligatorisch)
- param (string) – Name des Parameters (obligatorisch)
JSON-Objekt zur Anfrage: - parameter (Parameter) – zu aktualisierender Parameter als JSON-Objekt (obligatorisch)
Anfrage-Header: - Accept – application/json
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Parameter)
- 404 Not Found – Modul oder Parameter nicht gefunden
- 403 Forbidden – Aktualisierung des Parameters verboten, z. B. weil er aufgrund einer laufenden GigE Vision-Anwendung gesperrt ist oder keine valide Lizenz für diese Komponente vorliegt.
Referenzierte Datenmodelle:
-
GET/nodes/{node}/services¶ Abruf von Beschreibungen aller von einem Modul angebotenen Services.
Musteranfrage
GET /api/v1/nodes/<node>/services HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json [ { "args": {}, "description": "Restarts the component.", "name": "restart", "response": { "accepted": "bool", "current_state": "string" } }, { "args": {}, "description": "Starts the component.", "name": "start", "response": { "accepted": "bool", "current_state": "string" } }, { "args": {}, "description": "Stops the component.", "name": "stop", "response": { "accepted": "bool", "current_state": "string" } } ]
Parameter: - node (string) – Modulname (obligatorisch)
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Service-Array)
- 404 Not Found – Modul nicht gefunden
Referenzierte Datenmodelle:
-
GET/nodes/{node}/services/{service}¶ Abruf der Beschreibung eines modulspezifischen Services.
Musteranfrage
GET /api/v1/nodes/<node>/services/<service> HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "args": { "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "slot": "int32" }, "description": "Save a pose (grid or gripper) for later calibration.", "name": "set_pose", "response": { "message": "string", "status": "int32", "success": "bool" } }
Parameter: - node (string) – Modulname (obligatorisch)
- service (string) – Name des Service (obligatorisch)
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Funktion)
- 404 Not Found – Modul oder Service nicht gefunden
Referenzierte Datenmodelle:
-
PUT/nodes/{node}/services/{service}¶ Aufruf des Services eines Moduls: Die benötigten Argumente und die zugehörige Antwort hängt vom Modul und vom Service ab.
Musteranfrage
PUT /api/v1/nodes/<node>/services/<service> HTTP/1.1 Host: <rcvisard> Accept: application/json { "args": {} }
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "name": "set_pose", "response": { "message": "Grid detected, pose stored.", "status": 1, "success": true } }
Parameter: - node (string) – Modulname (obligatorisch)
- service (string) – Name des Service (obligatorisch)
JSON-Objekt zur Anfrage: - service args (Service) – Beispielargumente (obligatorisch)
Anfrage-Header: - Accept – application/json
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Funktion)
- 404 Not Found – Modul oder Service nicht gefunden
- 403 Forbidden – Service-Aufruf verboten, z. B. weil keine valide Lizenz für diese Komponente vorliegt.
Referenzierte Datenmodelle:
-
GET/nodes/{node}/status¶ Abruf des Status eines Moduls.
Musteranfrage
GET /api/v1/nodes/<node>/status HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "status": "running", "timestamp": 1503075030.2335997, "values": { "baseline": "0.0650542", "color": "0", "exp": "0.00426667", "focal": "0.844893", "fps": "25.1352", "gain": "12.0412", "height": "960", "temp_left": "39.6", "temp_right": "38.2", "time": "0.00406513", "width": "1280" } }
Parameter: - node (string) – Modulname (obligatorisch)
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: NodeStatus)
- 404 Not Found – Modul nicht gefunden
Referenzierte Datenmodelle:
Datenströme¶
Über die folgenden Ressourcen und Anfragen ist es möglich, auf die Streams der Die rc_dynamics-Schnittstelle zuzugreifen und diese zu konfigurieren. Mit diesen REST-API-Anfragen ist es möglich,
die verfügbaren und laufenden Datenströme anzuzeigen, z. B.
curl -X GET http://<rcvisard>/api/v1/datastreamseinen Datenstrom in Richtung eines Ziels zu starten, z. B.
curl -X PUT --header 'Content-Type: application/x-www-form-urlencoded' -d 'destination=<target-ip>:<target-port>' http://<rcvisard>/api/v1/datastreams/poseDatenströme zu stoppen, z. B.
curl -X DELETE http://<rcvisard>/api/v1/datastreams/pose?destination=<target-ip>:<target-port>
Die folgende Liste enthält alle REST-API-Anfragen zu Datenströmen:
-
GET/datastreams¶ Abruf einer Liste aller verfügbaren Datenströme.
Musteranfrage
GET /api/v1/datastreams HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json [ { "description": "Pose of left camera at VisualOdometry rate (~10Hz)", "destinations": [ "192.168.1.13:30000" ], "name": "pose", "protobuf": "Frame", "protocol": "UDP" }, { "description": "Pose of left camera (RealTime 200Hz)", "destinations": [ "192.168.1.100:20000", "192.168.1.42:45000" ], "name": "pose_rt", "protobuf": "Frame", "protocol": "UDP" }, { "description": "Raw IMU (InertialMeasurementUnit) values (RealTime 200Hz)", "destinations": [], "name": "imu", "protobuf": "Imu", "protocol": "UDP" }, { "description": "Dynamics of sensor (pose, velocity, acceleration) (RealTime 200Hz)", "destinations": [ "192.168.1.100:20001" ], "name": "dynamics", "protobuf": "Dynamics", "protocol": "UDP" } ]
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Stream-Array)
Referenzierte Datenmodelle:
-
GET/datastreams/{stream}¶ Abruf der Datenstrom-Konfiguration.
Musteranfrage
GET /api/v1/datastreams/<stream> HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "description": "Pose of left camera at VisualOdometry rate (~10Hz)", "destinations": [ "192.168.1.13:30000" ], "name": "pose", "protobuf": "Frame", "protocol": "UDP" }
Parameter: - stream (string) – Name des Streams (obligatorisch)
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Stream)
- 404 Not Found – Datenstrom nicht gefunden
Referenzierte Datenmodelle:
-
PUT/datastreams/{stream}¶ Aktualisierung einer Datenstrom-Konfiguration.
Musteranfrage
PUT /api/v1/datastreams/<stream> HTTP/1.1 Host: <rcvisard> Accept: application/x-www-form-urlencoded
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "description": "Pose of left camera at VisualOdometry rate (~10Hz)", "destinations": [ "192.168.1.13:30000", "192.168.1.25:40000" ], "name": "pose", "protobuf": "Frame", "protocol": "UDP" }
Parameter: - stream (string) – Name des Streams (obligatorisch)
Formularparameter: - destination – Hinzuzufügendes Ziel („IP:port“) (obligatorisch)
Anfrage-Header: - Accept – application/x-www-form-urlencoded
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Stream)
- 404 Not Found – Datenstrom nicht gefunden
Referenzierte Datenmodelle:
-
DELETE/datastreams/{stream}¶ Löschen eines Ziels aus der Datenstrom-Konfiguration.
Musteranfrage
DELETE /api/v1/datastreams/<stream>?destination=<destination> HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "description": "Pose of left camera at VisualOdometry rate (~10Hz)", "destinations": [], "name": "pose", "protobuf": "Frame", "protocol": "UDP" }
Parameter: - stream (string) – Name des Streams (obligatorisch)
Anfrageparameter: - destination (string) – Zu löschendes Ziel („IP:port“): Fehlt die Angabe, werden alle Ziele gelöscht (optional).
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Stream)
- 404 Not Found – Datenstrom nicht gefunden
Referenzierte Datenmodelle:
System und Logs¶
Die folgenden Ressourcen und Anfragen sind für die System-Level-API des rc_visard verfügbar. Sie ermöglichen Folgendes:
- Zugriff auf Logdateien (systemweit oder modulspezifisch);
- Abruf von Informationen zum Gerät und zur Laufzeitstatistik, wie Datum, MAC-Adresse, Uhrzeitsynchronisierungsstatus und verfügbare Ressourcen;
- Verwaltung installierter Softwarelizenzen; und
- Aktualisierung des Firmware-Images des rc_visard.
-
GET/logs¶ Abruf einer Liste aller verfügbaren Logdateien.
Musteranfrage
GET /api/v1/logs HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json [ { "date": 1503060035.0625782, "name": "rcsense-api.log", "size": 730 }, { "date": 1503060035.741574, "name": "stereo.log", "size": 39024 }, { "date": 1503060044.0475223, "name": "camera.log", "size": 1091 }, { "date": 1503060035.2115774, "name": "dynamics.log" } ]
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: LogInfo-Array)
Referenzierte Datenmodelle:
-
GET/logs/{log}¶ Abruf einer Logdatei: Die Art des Inhalts der Antwort richtet sich nach dem „format“-Parameter.
Musteranfrage
GET /api/v1/logs/<log>?format=<format>&limit=<limit> HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "date": 1503060035.2115774, "log": [ { "component": "rc_stereo_ins", "level": "INFO", "message": "Running rc_stereo_ins version 2.4.0", "timestamp": 1503060034.083 }, { "component": "rc_stereo_ins", "level": "INFO", "message": "Starting up communication interfaces", "timestamp": 1503060034.085 }, { "component": "rc_stereo_ins", "level": "INFO", "message": "Autostart disabled", "timestamp": 1503060034.098 }, { "component": "rc_stereo_ins", "level": "INFO", "message": "Initializing realtime communication", "timestamp": 1503060034.209 }, { "component": "rc_stereo_ins", "level": "INFO", "message": "Startet state machine in state IDLE", "timestamp": 1503060034.383 }, { "component": "rc_stereovisodo", "level": "INFO", "message": "Init stereovisodo ...", "timestamp": 1503060034.814 }, { "component": "rc_stereovisodo", "level": "INFO", "message": "rc_stereovisodo: Using standard VO", "timestamp": 1503060034.913 }, { "component": "rc_stereovisodo", "level": "INFO", "message": "rc_stereovisodo: Playback mode: false", "timestamp": 1503060035.132 }, { "component": "rc_stereovisodo", "level": "INFO", "message": "rc_stereovisodo: Ready", "timestamp": 1503060035.212 } ], "name": "dynamics.log", "size": 695 }
Parameter: - log (string) – Name der Logdatei (obligatorisch)
Anfrageparameter: - format (string) – Rückgabe des Logs im JSON- oder Rohdatenformat (mögliche Werte:
jsonoderraw; Voreinstellung:json) (optional) - limit (integer) – Beschränkung auf die letzten x Zeilen im JSON-Format (Voreinstellung:
100) (optional)
Antwort-Headers: - Content-Type – text/plain application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: Log)
- 404 Not Found – Log nicht gefunden
Referenzierte Datenmodelle:
-
GET/system¶ Abruf von Systeminformationen zum Sensor.
Musteranfrage
GET /api/v1/system HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "firmware": { "active_image": { "image_version": "rc_visard_v1.1.0" }, "fallback_booted": true, "inactive_image": { "image_version": "rc_visard_v1.0.0" }, "next_boot_image": "active_image" }, "hostname": "rc-visard-02873515", "link_speed": 1000, "mac": "00:14:2D:2B:D8:AB", "ntp_status": { "accuracy": "48 ms", "synchronized": true }, "ptp_status": { "master_ip": "", "offset": 0, "offset_dev": 0, "offset_mean": 0, "state": "off" }, "ready": true, "serial": "02873515", "time": 1504080462.641875, "uptime": 65457.42 }
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: SysInfo)
Referenzierte Datenmodelle:
-
GET/system/license¶ Abruf von Informationen zu den auf dem Sensor installierten Lizenzen.
Musteranfrage
GET /api/v1/system/license HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "components": { "calibration": true, "fusion": true, "hand_eye_calibration": true, "rectification": true, "self_calibration": true, "slam": false, "stereo": true, "svo": true }, "valid": true }
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: LicenseInfo)
Referenzierte Datenmodelle:
-
POST/system/license¶ Aktualisierung der auf dem Sensor installierten Lizenz mithilfe einer Lizenzdatei.
Musteranfrage
POST /api/v1/system/license HTTP/1.1 Host: <rcvisard> Accept: multipart/form-data
Formularparameter: - file – Lizenzdatei (obligatorisch)
Anfrage-Header: - Accept – Multipart/Formulardaten
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung
- 400 Bad Request – Keine gültige Lizenz
-
PUT/system/reboot¶ Neustart des Sensors.
Musteranfrage
PUT /api/v1/system/reboot HTTP/1.1 Host: <rcvisard>
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung
-
GET/system/rollback¶ Abruf von Informationen zu Firmware/System-Images, die aktuell auf dem Sensor aktiv oder inaktiv sind.
Musteranfrage
GET /api/v1/system/rollback HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "active_image": { "image_version": "rc_visard_v1.1.0" }, "fallback_booted": false, "inactive_image": { "image_version": "rc_visard_v1.0.0" }, "next_boot_image": "active_image" }
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: FirmwareInfo)
Referenzierte Datenmodelle:
-
PUT/system/rollback¶ Rollback auf vorherige Firmware-Version (inaktives System-Image).
Musteranfrage
PUT /api/v1/system/rollback HTTP/1.1 Host: <rcvisard>
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung
- 500 Internal Server Error – Interner Fehler
- 400 Bad Request – Bereits auf die Verwendung der inaktiven Partition beim nächsten Boot-Vorgang gesetzt.
-
GET/system/update¶ Abruf von Informationen zu Firmware/System-Images, die aktuell auf dem Sensor aktiv oder inaktiv sind.
Musteranfrage
GET /api/v1/system/update HTTP/1.1 Host: <rcvisard>
Musterantwort
HTTP/1.1 200 OK Content-Type: application/json { "active_image": { "image_version": "rc_visard_v1.1.0" }, "fallback_booted": false, "inactive_image": { "image_version": "rc_visard_v1.0.0" }, "next_boot_image": "active_image" }
Antwort-Headers: - Content-Type – application/json
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung (Rückgabe: FirmwareInfo)
Referenzierte Datenmodelle:
-
POST/system/update¶ Aktualisierung des Firmware/System-Images mit einer Mender-Artefakt-Datei: Um die aktualisierte Firmware zu aktivieren, ist anschließend ein Neustart erforderlich.
Musteranfrage
POST /api/v1/system/update HTTP/1.1 Host: <rcvisard> Accept: multipart/form-data
Formularparameter: - file – Mender-Artefakt-Datei (obligatorisch)
Anfrage-Header: - Accept – Multipart/Formulardaten
Statuscodes: - 200 OK – Erfolgreiche Verarbeitung
- 400 Bad Request – Client-Fehler, z. B. kein gültiges Mender-Artefakt
Datentyp-Definitionen¶
Die REST-API definiert folgende Datenmodelle, die verwendet werden, um auf die verfügbaren Ressourcen zuzugreifen oder diese zu ändern, entweder als benötigte Attribute/Parameter oder als Rückgabewerte.
- FirmwareInfo:
Informationen zu aktuell aktiven und inaktiven Firmware-Images und dazu, welches Image für den Boot-Vorgang verwendet wird.
Ein Objekt des Typs FirmwareInfo besitzt folgende Eigenschaften:
- active_image (ImageInfo): siehe Beschreibung von ImageInfo.
- fallback_booted (boolean): TRUE, wenn das gewünschte Image nicht hochgefahren werden konnte und ein Fallback auf das zuvor genutzte Image vorgenommen wurde.
- inactive_image (ImageInfo): siehe Beschreibung von ImageInfo.
- next_boot_image (string): Firmware-Image, das beim nächsten Neustart geladen wird (entweder
active_imageoderinactive_image).
Musterobjekt
{ "active_image": { "image_version": "string" }, "fallback_booted": false, "inactive_image": { "image_version": "string" }, "next_boot_image": "string" }
FirmwareInfo-Objekte sind in SysInfo enthalten und werden für folgende Anfragen verwendet:
- ImageInfo:
Informationen zu einem bestimmten Firmware-Image.
Ein Objekt des Typs ImageInfo besitzt folgende Eigenschaften:
- image_version (string): Image-Version.
Musterobjekt
{ "image_version": "string" }
ImageInfo-Objekte sind in FirmwareInfo enthalten.
- LicenseComponents:
Liste der Lizenzstatus-Angaben der einzelnen Software Komponenten: Der zugehörige Statusindikator ist auf TRUE gesetzt, wenn die entsprechende Komponente mit einer installierten Softwarelizenz entsperrt ist.
Ein Objekt des Typs LicenseComponents besitzt folgende Eigenschaften:
- calibration (boolean): Komponente zur Kamerakalibrierung.
- fusion (boolean): Komponente zur Stereo-INS/Datenfusion.
- hand_eye_calibration (boolean): Komponente zur Hand-Auge-Kalibrierung.
- rectification (boolean): Komponente zur Bildrektifizierung.
- self_calibration (boolean): Komponente zur Selbstkalibrierung der Kamera.
- slam (boolean): SLAM-Komponente.
- stereo (boolean): Stereo-Matching-Komponente.
- svo (boolean): visuelle Odometrie-Komponente.
Musterobjekt
{ "calibration": false, "fusion": false, "hand_eye_calibration": false, "rectification": false, "self_calibration": false, "slam": false, "stereo": false, "svo": false }
LicenseComponents-Objekte sind in LicenseInfo enthalten.
- LicenseInfo:
Informationen zur aktuell auf dem Sensor angewandten Softwarelizenz.
Ein Objekt des Typs LicenseInfo besitzt folgende Eigenschaften:
- components (LicenseComponents): siehe Beschreibung von LicenseComponents.
- valid (boolean): Angabe, ob eine Lizenz gültig ist oder nicht.
Musterobjekt
{ "components": { "calibration": false, "fusion": false, "hand_eye_calibration": false, "rectification": false, "self_calibration": false, "slam": false, "stereo": false, "svo": false }, "valid": false }
LicenseInfo-Objekte werden in folgenden Anfragen verwendet:
- Log:
Inhalt einer bestimmten Logdatei im JSON-Format.
Ein Objekt des Typs Log besitzt folgende Eigenschaften:
- date (Float): UNIX-Uhrzeit, zu der das Log zuletzt geändert wurde.
- log (LogEntry-Array): die eigentlichen Logeinträge.
- name (string): Name der Logdatei.
- size (integer): Größe der Logdatei in Bytes.
Musterobjekt
{ "date": 0, "log": [ { "component": "string", "level": "string", "message": "string", "timestamp": 0 }, { "component": "string", "level": "string", "message": "string", "timestamp": 0 } ], "name": "string", "size": 0 }
Log-Objekte werden in folgenden Anfragen verwendet:
- LogEntry:
Darstellung eines einzelnen Logeintrags in einer Logdatei.
Ein Objekt des Typs LogEntry besitzt folgende Eigenschaften:
- component (string): Name der Komponente, die diesen Eintrag angelegt hat.
- level (string): Logstufe (mögliche Werte:
DEBUG,INFO,WARN,ERRORoderFATAL) - message (string): eigentliche Lognachricht.
- timestamp (Float): UNIX-Uhrzeit des Logeintrags.
Musterobjekt
{ "component": "string", "level": "string", "message": "string", "timestamp": 0 }
LogEntry-Objekte sind in Log enthalten.
- LogInfo:
Informationen zu einer bestimmten Logdatei.
Ein Objekt des Typs LogInfo besitzt folgende Eigenschaften:
- date (Float): UNIX-Uhrzeit, zu der das Log zuletzt geändert wurde.
- name (string): Name der Logdatei.
- size (integer): Größe der Logdatei in Bytes.
Musterobjekt
{ "date": 0, "name": "string", "size": 0 }
LogInfo-Objekte werden in folgenden Anfragen verwendet:
- NodeInfo:
Beschreibung eines auf dem Sensor laufenden Softwaremoduls.
Ein Objekt des Typs NodeInfo besitzt folgende Eigenschaften:
- name (string): Name des Moduls.
- parameters (String-Array): Liste der Laufzeitparameter des Moduls.
- services (String-Array): Liste der von diesem Modul angebotenen Services.
- status (string): Status des Moduls (mögliche Werte:
unknown,down,staleoderrunning).
Musterobjekt
{ "name": "string", "parameters": [ "string", "string" ], "services": [ "string", "string" ], "status": "string" }
NodeInfo-Objekte werden in folgenden Anfragen verwendet:
- NodeStatus:
Detaillierter aktueller Status des Moduls, einschließlich Laufzeitstatistik.
Ein Objekt des Typs NodeStatus besitzt folgende Eigenschaften:
- status (string): Status des Moduls (mögliche Werte:
unknown,down,staleoderrunning). - timestamp (Float): UNIX-Uhrzeit, zu der die Werte zuletzt aktualisiert wurden.
- values (object): Dictionary (Schlüssel-Werte-Auflistung) mit den aktuellen Statuswerten/Statistiken des Moduls.
Musterobjekt
{ "status": "string", "timestamp": 0, "values": {} }
NodeStatus-Objekte werden in folgenden Anfragen verwendet:
- status (string): Status des Moduls (mögliche Werte:
- NtpStatus:
Status der NTP-Zeitsynchronisierung.
Ein Objekt des Typs NtpStatus besitzt folgende Eigenschaften:
- accuracy (string): vom Network Time Protocol (NTP) gemeldete Genauigkeit der Zeitsynchronisierung.
- synchronized (boolean): synchronisiert mit dem NTP-Server.
Musterobjekt
{ "accuracy": "string", "synchronized": false }
NtpStatus-Objekte sind in SysInfo enthalten.
- Parameter:
Darstellung der Laufzeitparameter eines Moduls: Der Datentyp des Werts („value“) eines Parameters (und damit der Datentyp der Felder „min“, „max“ und „default“) lässt sich vom Feld „type“ ableiten und kann ein primitiver Datentyp sein.
Ein Objekt des Typs Parameter besitzt folgende Eigenschaften:
- default (Typ nicht definiert): ab Werk voreingestellter Wert des Parameters.
- description (string): Beschreibung des Parameters.
- max (Typ nicht definiert): Höchstwert, der diesem Parameter zugewiesen werden kann.
- min (Typ nicht definiert): Mindestwert, der diesem Parameter zugewiesen werden kann.
- name (string): Name des Parameters.
- type (string): als Zeichenfolge dargestellter primitiver Datentyp des Parameters (mögliche Werte:
bool,int8,uint8,int16,uint16,int32,uint32,int64,uint64,float32,float64oderstring). - value (Typ nicht definiert): aktueller Wert des Parameters.
Musterobjekt
{ "default": {}, "description": "string", "max": {}, "min": {}, "name": "string", "type": "string", "value": {} }
Parameter-Objekte werden in folgenden Anfragen verwendet:
- PtpStatus:
Status der PTP-Zeitsynchronisierung gemäß IEEE 1588.
Ein Objekt des Typs PtpStatus besitzt folgende Eigenschaften:
- master_ip (string): IP-Adresse des Haupttaktgebers.
- offset (Float): zeitlicher Versatz zum Haupttaktgeber in Sekunden.
- offset_dev (Float): Standardabweichung des zeitlichen Versatzes zum Haupttaktgeber in Sekunden.
- offset_mean (Float): mittlere Zeitverschiebung in Sekunden zum Haupttaktgeber.
- state (string): PTP-Zustand (mögliche Werte:
off,unknown,INITIALIZING,FAULTY,DISABLED,LISTENING,PASSIVE,UNCALIBRATEDoderSLAVE).
Musterobjekt
{ "master_ip": "string", "offset": 0, "offset_dev": 0, "offset_mean": 0, "state": "string" }
PtpStatus-Objekte sind in SysInfo enthalten.
- Service:
Darstellung eines von einem Modul angebotenen Services.
Ein Objekt des Typs Service besitzt folgende Eigenschaften:
- args (ServiceArgs): siehe Beschreibung von ServiceArgs.
- description (string): Kurzbeschreibung des Services.
- name (string): Name des Services.
- response (ServiceResponse): siehe Beschreibung von ServiceResponse.
Musterobjekt
{ "args": {}, "description": "string", "name": "string", "response": {} }
Service-Objekte werden in folgenden Anfragen verwendet:
- ServiceArgs:
Argumente, die für den Aufruf eines Services benötigt werden: Diese Argumente werden in der Regel in einem (verschachtelten) Dictionary (Schlüssel-Werte-Auflistung) dargestellt. Der genaue Inhalt dieses Dictionarys hängt vom jeweiligen Modul und vom Serviceaufruf ab.
ServiceArg-Objekte sind in Service enthalten.
- ServiceResponse:
Die von dem Serviceaufruf zurückgegebene Antwort: Die Antwort wird in der Regel in einem (verschachtelten) Dictionary (Schlüssel-Werte-Auflistung) dargestellt. Der genaue Inhalt dieses Dictionarys hängt vom jeweiligen Modul und von dem Serviceaufruf ab.
ServiceResponse-Objekte sind in Service enthalten.
- Stream:
Darstellung eines von der rc_dynamics-Schnittstelle bereitgestellten Datenstroms.
Ein Objekt des Typs Stream besitzt folgende Eigenschaften:
- destinations (StreamDestination-Array): Liste der Ziele, an welche diese Daten aktuell gestreamt werden.
- name (string): Name des Datenstroms, der angibt, welche rc_dynamics-Daten gestreamt werden.
- type (StreamType): siehe Beschreibung von StreamType.
Musterobjekt
{ "destinations": [ "string", "string" ], "name": "string", "type": { "protobuf": "string", "protocol": "string" } }
Stream-Objekte werden in folgenden Anfragen verwendet:
- StreamDestination:
Ein Ziel eines rc_dynamics-Datenstroms, dargestellt als Zeichenfolge wie z. B. ‚IP:port‘.
Ein Objekt des Typs StreamDestination ist eine Zeichenfolge.
StreamDestination-Objekte sind in Stream enthalten.
- StreamType:
Beschreibung eines Datenstromprotokolls.
Ein Objekt des Typs StreamType besitzt folgende Eigenschaften:
- protobuf (string): Datenformat zur Serialisierung, d. h. Name der ProtoBuf-Nachrichtendefinition.
- protocol (string): Netzwerkprotokoll des Streams (UDP).
Musterobjekt
{ "protobuf": "string", "protocol": "string" }
StreamType-Objekte sind in Stream enthalten.
- SysInfo:
Systeminformation zum Sensor.
Ein Objekt des Typs SysInfo besitzt folgende Eigenschaften:
- firmware (FirmwareInfo): siehe Beschreibung von FirmwareInfo.
- hostname (string): Host-Name.
- link_speed (integer): Ethernet-Verbindungsgeschwindigkeit in Mb/Sekunde.
- mac (string): MAC-Adresse.
- ntp_status (NtpStatus): siehe Beschreibung von NtpStatus.
- ptp_status (PtpStatus): siehe Beschreibung von PtpStatus.
- ready (boolean): Das System ist vollständig hochgefahren und betriebsbereit.
- serial (string): Seriennummer des Sensors.
- time (Float): Systemzeit als UNIX-Zeitstempel.
- uptime (Float): Betriebszeit in Sekunden.
Musterobjekt
{ "firmware": { "active_image": { "image_version": "string" }, "fallback_booted": false, "inactive_image": { "image_version": "string" }, "next_boot_image": "string" }, "hostname": "string", "link_speed": 0, "mac": "string", "ntp_status": { "accuracy": "string", "synchronized": false }, "ptp_status": { "master_ip": "string", "offset": 0, "offset_dev": 0, "offset_mean": 0, "state": "string" }, "ready": false, "serial": "string", "time": 0, "uptime": 0 }
SysInfo-Objekte werden in folgenden Anfragen verwendet:
Swagger UI¶
Die Swagger UI des rc_visard ermöglicht es Entwicklern, die REST-API – beispielsweise zu Entwicklungs- und Testzwecken – leicht darzustellen und zu verwenden. Der Zugriff auf http://<rcvisard>/api/ oder auf http://<rcvisard>/api/swagger (der erste Link leitet automatisch auf den zweiten Link weiter) öffnet eine Vorschau der allgemeinen API-Struktur des rc_visard, einschließlich aller verfügbaren Ressourcen und Anfragen . Auf dieser vereinfachten Benutzeroberfläche lassen sich alle Funktionen erkunden und austesten.
Hinweis
Der Benutzer muss bedenken, dass die Swagger UI des rc_visard, auch wenn sie zur Erprobung der REST-API bestimmt ist, ein voll funktionstüchtige Schnittstelle ist. Das bedeutet, dass alle ausgelösten Anfragen tatsächlich bearbeitet werden und den Zustand und/oder das Verhalten des Geräts beeinflussen. Dies gilt insbesondere für Anfrage des Typs PUT, POST und DELETE.

Abb. 47 Startansicht der Swagger UI des rc_visard, bei der die Ressourcen und Anfragen in nodes, datastreams, logs und system gruppiert sind.
Mithilfe dieser Schnittstelle können alle verfügbaren Ressourcen und Anfragen erprobt werden, indem diese durch Klick auf- und zugeklappt werden. Die folgende Abbildung zeigt ein Beispiel dafür, wie sich der aktuelle Zustand eines Moduls abrufen lässt, indem der erforderliche Parameter (node-Name) ausgefüllt und anschließend die Schaltfläche Try it out! betätigt wird. Daraufhin zeigt die Swagger UI unter anderem den curl-Befehl an, der bei Auslösung der Anfrage ausgeführt wurde, sowie den Antworttext, in dem der aktuelle Status des angefragten Moduls in einer Zeichenfolge im JSON-Format enthalten ist.
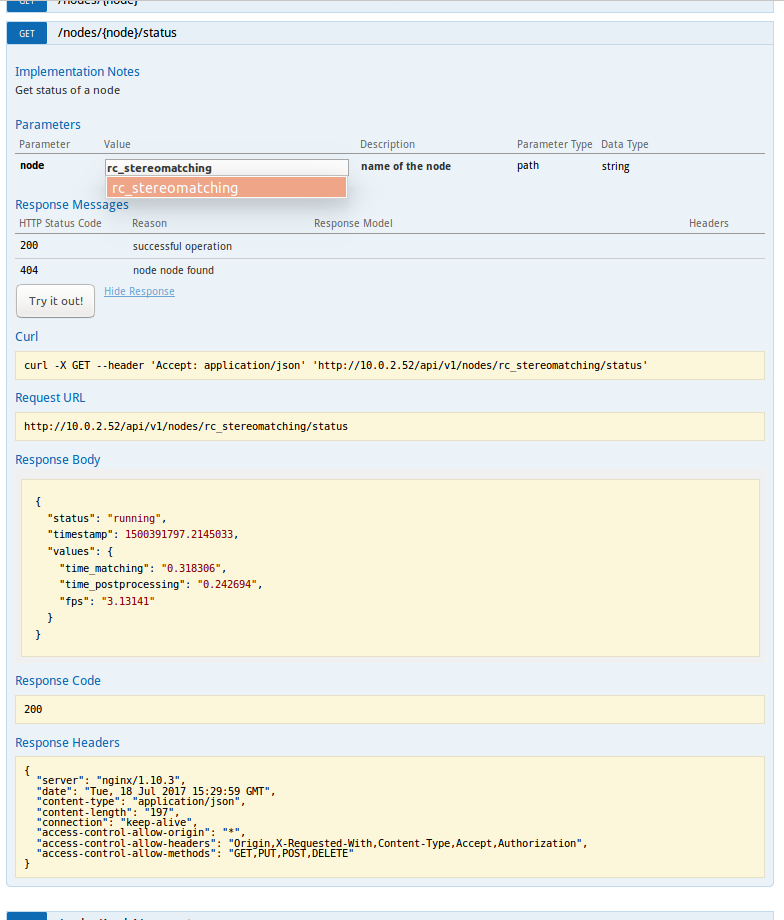
Abb. 48 Ergebnis nach Abfrage des Status des rc_stereomatching-Moduls
Einige Aktionen, wie das Setzen von Parametern oder der Aufruf von Services, bedürfen komplexerer Parameter als eine HTTP-Anfrage. Die Swagger UI erlaubt es Entwicklern, die für diese Aktionen benötigten Attribute, wie im nächsten Beispiel gezeigt, während der Laufzeit zu erkunden. In der folgenden Abbildung werden die Attribute, die für den set_pose-Service des rc_hand_eye_calibration-Moduls benötigt werden, erkundet, indem eine GET-Anfrage zu dieser Ressource durchgeführt wird. Die Antwort enthält eine vollständige Beschreibung des angebotenen Services, einschließlich aller erforderlichen Argumente mit ihren Namen und Typen in einer Zeichenfolge im JSON-Format.
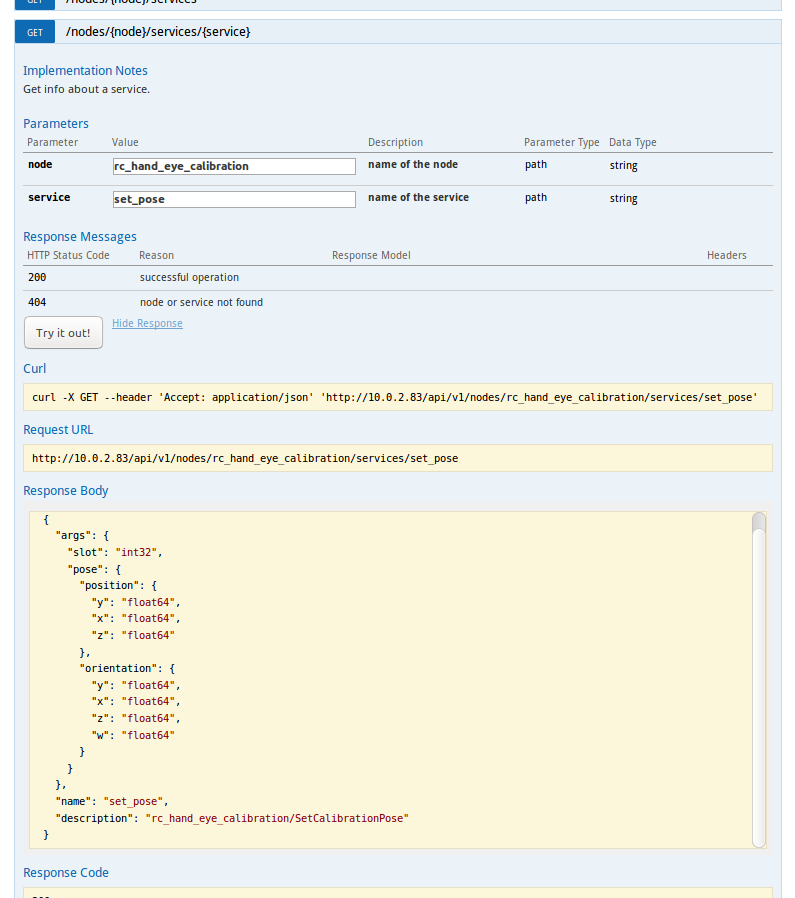
Abb. 49 Ergebnis der GET-Anfrage zum set_pose-Service zeigt die für diesen Service benötigten Argumente
Der Benutzer kann diesen vorformatierten JSON als Muster für die Argumente nutzen, um damit den Service tatsächlich aufzurufen:
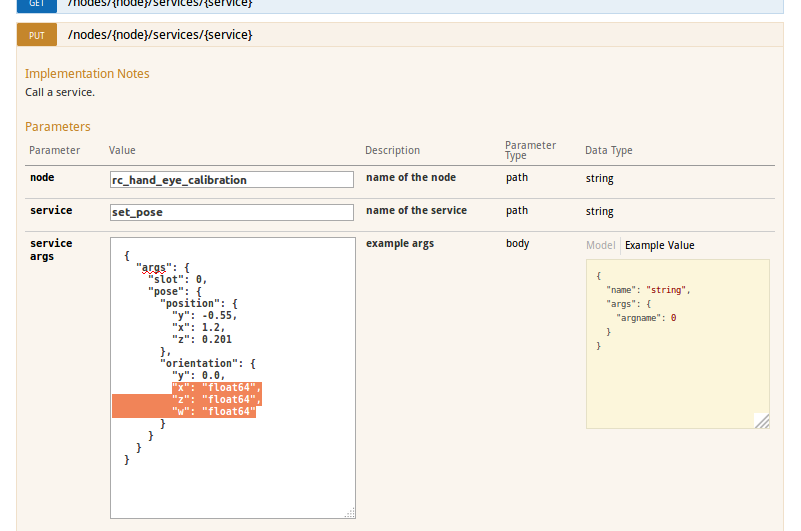
Abb. 50 Ausfüllen der Argumente des set_pose-Services