Sensordynamik¶
Das Dynamik-Modul liefert Schätzungen des Sensorzustands, der die Pose (Position und Orientierung), Lineargeschwindigkeit, Linearbeschleunigung und Drehrate des Sensors umfasst. Mit diesem Modul lassen sich Datenströme für die verschiedenen Submodule starten, stoppen und verwalten:
- Visuelle Odometrie (
rc_stereovisodo) - schätzt die Kamerabewegung auf Grundlage der Bewegung von charakteristischen Bildpunkten im linken Kamerabild.
- Visuelle Odometrie (
- Stereo-INS (
rc_stereo_ins) - kombiniert die per visueller Odometrie ermittelten Werte mit den Daten der integrierten inertialen Messeinheit (IMU), um auf dieser Grundlage akkurate und hochfrequente Echtzeit-Zustandsschätzungen bereitzustellen.
- Stereo-INS (
Koordinatensysteme für die Zustandsschätzung¶
Das Weltkoordinatensystem für die Zustandsschätzung definiert sich wie folgt: Die Z-Achse des Koordinatensystems zeigt nach oben und ist am Gravitationsvektor ausgerichtet. Die X-Achse liegt orthogonal zur Z-Achse und zeigt in die Blickrichtung des rc_visard zum Zeitpunkt, zu dem die Zustandsschätzung beginnt. Der Ursprung des Weltkoordinatensystems befindet sich am Ursprung des IMU-Koordinatensystems des rc_visard in dem Augenblick, in dem die Zustandsschätzung aktiviert wird.
Wird die Zustandsschätzung aktiviert, wenn die Blickrichtung des rc_visard parallel zum Gravitationsvektor liegt (mit einem Toleranzbereich von 10 Grad), dann ist die Y-Achse des Weltkoordinatensystems entweder an der positiven oder negativen X-Achse des IMU-Koordinatensystems ausgerichtet. In diesem Fall ist die Anfangsausrichtung des Weltkoordinatensystems nicht mehr kontinuierlich. Es ist also besondere Vorsicht geboten, wenn die Zustandsschätzung mit dieser Orientierung beginnt.

Abb. 22 Koordinatensysteme für die Zustandsschätzung: Das IMU-Koordinatensystem liegt im Gehäuse des rc_visard, das Kamera-Koordinatensystem im Fokuspunkt der linken Kamera.
Die Transformation zwischen dem IMU-Koordinatensystem und dem Kamera/Sensor-Koordinatensystem wird ebenfalls geschätzt und über die rc_dynamics-Schnittstelle im Echtzeit-Dynamik-Datenstrom bereitgestellt (siehe Schnittstellen).
Achtung
Das Stereo-INS-Modul führt während der Initialisierung eine Selbstkalibrierung der IMU durch. Deswegen darf sich der rc_visard während des Startens des Stereo-INS-Moduls nicht bewegen und muss ausreichend viel Textur sehen können.
Verfügbare Zustandsschätzungen¶
Der rc_visard bietet über die rc_dynamics-Schnittstelle sieben verschiedene Arten an Datenströmen mit zeitgestempelten Zustandsschätzungen an (siehe Die rc_dynamics-Schnittstelle):
| Name | Frequenz | Quelle | Beschreibung |
|---|---|---|---|
| pose | 25 Hz | Best Effort | genaueste Schätzung der Pose des Kamerakoordinatensystems, aber leicht zeitverzögert |
| pose_ins | 25 Hz | Stereo-INS | genaueste Schätzung der Pose des Kamerakoordinatensystems, aber leicht zeitverzögert |
| pose_rt | 200 Hz | Best Effort | Pose des Kamerakoordinatensystems |
| pose_rt_ins | 200 Hz | Stereo-INS | Pose des Kamerakoordinatensystems |
| dynamics | 200 Hz | Best Effort | Pose, Geschwindigkeit und Beschleunigung im IMU-Koordinatensystem |
| dynamics_ins | 200 Hz | Stereo-INS | Pose, Geschwindigkeit und Beschleunigung im IMU-Koordinatensystem |
| imu | 200 Hz | Stereo-INS | IMU-Rohdaten |
Best Effort bedeutet hier für den Fall, dass das SLAM-Modul läuft, dass der Datenstrom per Loop-Closure korrigierte Schätzungen umfasst, bzw. dass er dem vom Stereo-INS bereitgestellten Datenstrom entspricht, wenn SLAM nicht läuft ist.
Kameraposen-Datenströme (pose und pose_ins)¶
Die Kameraposen-Datenströme heißen pose und pose_ins und sie werden mit einer Frequenz von 25 Hz mit Zeitstempeln bereitgestellt, die den Bildzeitstempeln entsprechen. pose bietet eine Best-Effort-Schätzung, für die rc_slam und rc_stereo_ins kombiniert werden, wenn das SLAM-Modul läuft. Läuft das SLAM-Modul nicht, sind beide Datenströme gleichwertig. Die Posen werden in Weltkoordinaten angegeben und beziehen sich auf den Ursprung des Kamerakoordinatensystems (siehe Koordinatensysteme für die Zustandsschätzung). Die Datenströme umfassen genaueste Schätzungen, für die alle verfügbaren Daten des rc_visard berücksichtigt werden. Sie können für Modellierungsanwendungen eingesetzt werden, bei denen Kamerabilder, Tiefenbilder oder Punktwolken mit höchster Genauigkeit aneinander ausgerichtet werden müssen. Um die größtmögliche Genauigkeit sicherzustellen, verzögert sich die Ausgabe dieser Datenströme, bis die zugehörigen Messwerte aus der visuellen Odometrie verfügbar sind.
Echtzeit-Datenströme der Kamerapose (pose_rt und pose_rt_ins)¶
Die Echtzeit-Datenströme der Kamerapose heißen pose_rt und pose_rt_ins und sie werden mit der IMU-Frequenz von 200 Hz bereitgestellt. pose_rt bietet eine Best-Effort-Schätzung, für die rc_slam und rc_stereo_ins kombiniert werden, wenn das SLAM-Modul läuft. Läuft das SLAM-Modul nicht, sind beide Datenströme gleichwertig. Die Posen werden in Weltkoordinaten angegeben und beziehen sich auf den Ursprung des Koordinatensystems der rc_visard-Kamera (siehe Koordinatensysteme für die Zustandsschätzung). Die in diesen Datenströmen enthaltenen Werte entsprechen den Werten in den Echtzeit-Dynamik-Datenströmen, geben aber die Pose im Sensor/Kamera-Koordinatensystem statt im IMU-Koordinatensystem an.
Echtzeit-Dynamik-Datenströme (dynamics und dynamics_ins)¶
Die beiden Echtzeit-Dynamik-Datenströme heißen dynamics und dynamics_ins und sie werden mit der IMU-Frequenz von 200 Hz bereitgestellt. dynamics bietet eine Best-Effort-Schätzung, für die rc_slam und rc_stereo_ins kombiniert werden, wenn das SLAM-Modul läuft. Läuft das SLAM-Modul nicht, sind beide Datenströme gleichwertig. Die Schätzungen können für die Echtzeitregelung eines Roboters verwendet werden. Da die Werte in Echtzeit bereitgestellt werden und die Berechnung der visuellen Odometrie eine gewisse Bearbeitungszeit erfordert, ist die letzte Odometrieschätzung möglicherweise nicht enthalten. Daher sind diese Schätzungen im Allgemeinen etwas weniger genau als die nicht in Echtzeit bereitgestellten Kameraposen-Datenströme (siehe oben); dennoch sind es zu diesem Zeitpunkt die bestmöglichen Schätzungen. Die bereitgestellten Dynamik-Datenströme enthalten folgende Werte zum rc_visard:
- Translation \(\mathbf{p} = (x, y, z)^T\) in \(m\);
- Rotation \(\mathbf{q} = (q_x, q_y, q_z, q_w)^T\) als Einheitsquaternion;
- Lineargeschwindigkeit \(\mathbf{v} = (v_x, v_y, v_z)^T\) in \(\frac{m}{s}\);
- Winkelgeschwindigkeit \(\mathbf{\omega} = (\omega_x, \omega_y, \omega_z)^T\) in \(\frac{rad}{s}\);
- gravitationskompensierte Linearbeschleunigung \(\mathbf{a} = (a_x, a_y, a_z)^T\) in \(\frac{m}{s^2}\) und
- Transformation zwischen Kamera- und IMU-Koordinatensystem als Pose mit Frame-Namen und Parent-Frame-Namen.
Der Datenstrom enthält für jede Datenkomponente zusätzlich den Namen des Koordinatensystems, in dem die Werte angegeben sind. Translations-, Rotations- und Lineargeschwindigkeiten werden im Weltkoordinatensystem, Winkelgeschwindigkeiten und Winkelbeschleunigungen im IMU-Koordinatensystem angegeben (siehe Koordinatensysteme für die Zustandsschätzung). Alle Werte beziehen sich auf den Ursprung des IMU-Koordinatensystems. Dies bedeutet beispielsweise, dass die Lineargeschwindigkeit der Geschwindigkeit des IMU-Koordinatenursprungs im Weltkoordinatensystem entspricht.
Schließlich enthält der Datenstrom den Statusindikator possible_jump, der auf TRUE gesetzt ist, wann immer das optional erhältliche SLAM-Modul (siehe SLAM) die Zustandsschätzung nach einem Schleifenschluss (Loop Closure) korrigiert. Die Zustandsschätzung kann in diesem Fall einen Sprung machen, was beachtet werden sollte, wenn die Werte in einem Regelkreis verwendet werden. Wenn SLAM nicht läuft, bleibt der Statusindikator possible_jump auf FALSE und kann ignoriert werden.
IMU-Datenstrom (imu)¶
Der IMU-Datenstrom heißt imu und wird mit der IMU-Frequenz von 200 Hz bereitgestellt. Er umfasst die Beschleunigungen in X-, Y- und Z-Richtung sowie die Winkelgeschwindigkeiten um diese drei Achsen. Diese Werte sind kalibriert, aber nicht bias- und gravitationskompensiert, und werden im IMU-Koordinatensystem angegeben. Die Transformation zwischen dem IMU-Koordinatensystem und dem Sensorkoordinatensystem wird im Echtzeit-Dynamik-Datenstrom bereitgestellt.
Services¶
Das Sensordynamik-Modul bietet folgende Services zum Starten der Dynamik-/Bewegungsschätzung. Alle Services geben einen numerischen Code des eingetretenen Zustands zurück. Die Bedeutung der zurückgegebenen Zustandscodes und deren Namen werden in Tab. 10 angegeben.
| Zustandsname | Beschreibung |
|---|---|
| IDLE | Das Dynamikmodul ist bereit aber inaktiv |
| WAITING_FOR_INS | Es wird auf Daten des Stereo-INS-Moduls gewartet |
| WAITING_FOR_INS_AND_SLAM | Es wird auf Daten des Stereo-INS- und des SLAM-Moduls gewartet |
| RUNNING | Das Stereo-INS-Modul läuft |
| WAITING_FOR_SLAM | Es wird auf den Start des SLAM-Moduls gewartet (Stereo-INS läuft) |
| RUNNING_WITH_SLAM | Die Module Stereo INS und SLAM laufen |
| FATAL | Ein fataler Fehler ist aufgetreten (im Stereo-INS- oder SLAM-Modul) |
startStartet das Stereo-INS-Modul. Der Status geht von
IDLEüberWAITING_FOR_INSzuRUNNING.Für diesen Service sind keine Argumente nötig.
Dieser Service liefert folgenden Rückgabewert:
{ "accepted": "bool", "current_state": "string" }
start_slamStartet SLAM und – falls es noch nicht läuft – das Stereo-INS-Modul. Aus dem Zustand
IDLEgeht es überWAITING_FOR_INS_AND_SLAMundWAITING_FOR_SLAMzuRUNNING_WITH_SLAM. Aus dem ZustandRUNNINGgeht es überWAITING_FOR_SLAMzuRUNNING_WITH_SLAM.Für diesen Service sind keine Argumente nötig.
Dieser Service liefert folgenden Rückgabewert:
{ "accepted": "bool", "current_state": "string" }
stopStoppt das Stereo-INS-Modul und – falls es läuft – das SLAM-Modul. Die Trajektorienschätzung des SLAM-Moduls (bis zum Zeitpunkt des Stoppens) ist weiterhin verfügbar. Geht vom Zustand
RUNNINGoderRUNNING_WITH_SLAMzuIDLE.Für diesen Service sind keine Argumente nötig.
Dieser Service liefert folgenden Rückgabewert:
{ "accepted": "bool", "current_state": "string" }
stop_slamStoppt das SLAM-Modul. Das Stereo-INS-Modul läuft weiter. Die Trajektorienschätzung des SLAM-Moduls (bis zum Zeitpunkt des Stoppens) ist weiterhin verfügbar. Geht vom Zustand
RUNNING_WITH_SLAMzuIDLE.Für diesen Service sind keine Argumente nötig.
Dieser Service liefert folgenden Rückgabewert:
{ "accepted": "bool", "current_state": "string" }
restartStartet die Stereo-INS neu. Äquivalent zu aufeinanderforgendem
stopundstart.Vom Zustand
RUNNINGoderRUNNING_WITH_SLAM: Geht über die ZuständeIDLEundWAITING_FOR_INSzuRUNNING.Für diesen Service sind keine Argumente nötig.
Dieser Service liefert folgenden Rückgabewert:
{ "accepted": "bool", "current_state": "string" }
restart_slamNeustart in den SLAM-Modus. Äquivalent zu aufeinanderfolgendem
stopundstart_slam.Vom Zustand
RUNNINGoderRUNNING_WITH_SLAM: Geht über die ZuständeIDLE,WAITING_FOR_INS_AND_SLAM,WAITING_FOR_SLAMzuRUNNING_WITH_SLAM.Für diesen Service sind keine Argumente nötig.
Dieser Service liefert folgenden Rückgabewert:
{ "accepted": "bool", "current_state": "string" }
Das folgende Diagramm zeigt die wichtigsten Zustände und Übergänge. Zwischenzustände und der Fehlerzustand FATAL sind aus Gründen der Übersichtlichkeit nicht aufgeführt.
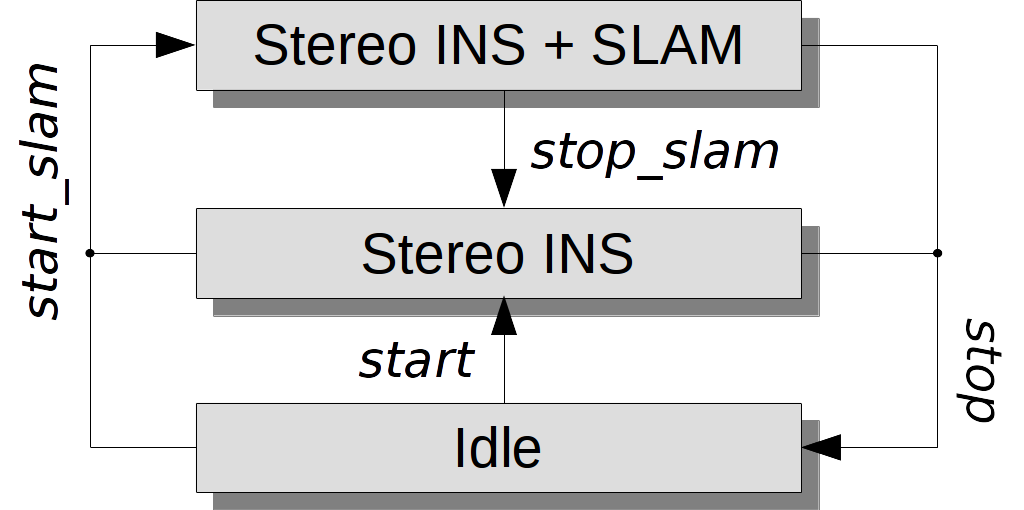
Abb. 23 Vereinfachtes Zustandsdiagramm
Die Services sollten schnell reagieren. Deswegen ist bei Services, die eine Zustandsänderung verursachen, der Rückgabewert current_state im Allgemeinen der erste neue (Zwischen-)Zustand, in den gewechselt wurde, und nicht der finale Zustand. Zum Beispiel gibt der start Service als current_state WAITING_FOR_INS und nicht RUNNING zurück. Falls der Zustandsübergang nicht innerhalb von 0.1 Sekunden vonstatten geht, wird der aktuelle Zustand zurückgegeben. In Tab. 10 ist die Bedeutung der zurückgegebenen Zustandscodes aufgeführt.
Hinweis
Der Zustand FATAL kann nur durch den Aufruf des stop Services verlassen werden. Dieser Service geht in den Zustand IDLE. Die Services restart und restart_slam nutzen intern auch stop und funktionieren daher ebenso. Die Services start und start_slam funktionieren nur, wenn der aktuelle Zustand IDLE ist, und haben keinen Effekt wenn der Zustand FATAL ist.
Hinweis
Das Sensordynamik-Modul lässt sich auch über die Rubrik Dynamik auf der Registerkarte Überblick der Web GUI starten und stoppen.
get_cam2imu_transformGibt die Transformation zwischen Kamera- und IMU-Koordinatensystem zurück. Diese entspricht der
cam2imu_transformder Dynamics Nachricht.Für diesen Service sind keine Argumente nötig.
Dieser Service liefert folgenden Rückgabewert:
{ "name": "string", "parent": "string", "pose": { "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "timestamp": { "nsec": "int32", "sec": "int32" } } }