Stereo-Matching Modul¶
Das Stereo-Matching-Modul ist ein Basismodul, das auf jedem rc_visard verfügbar ist, und berechnet auf Grundlage des rektifizierten Stereobildpaars Disparitäts-, Fehler- und Konfidenzbilder.
Um Disparitäts-, Fehler- und Konfidenzbilder in voller Auflösung zu berechnen, wird eine gesonderte StereoPlus Lizenz benötigt. Diese Lizenz ist auf jedem rc_visard vorhanden, der nach dem 31.01.2019 gekauft wurde.
Parameter¶
Das Stereo-Matching-Modul wird in der REST-API als rc_stereomatching bezeichnet und in der Web GUI auf der Seite Tiefenbild dargestellt. Der Benutzer kann die Stereo-Matching-Parameter entweder dort oder über die REST-API (REST-API-Schnittstelle) ändern.
Übersicht über die Parameter¶
Dieses Softwaremodul bietet folgende Laufzeitparameter:
| Name | Typ | Min. | Max. | Default | Beschreibung |
|---|---|---|---|---|---|
acquisition_mode |
string | - | - | Continuous | Aufnahmemodus: [Continuous, SingleFrame, SingleFrameOut1] |
double_shot |
bool | false | true | false | Kombination zweier Disparitätsbilder von zwei Stereobildpaaren |
exposure_adapt_timeout |
float64 | 0.0 | 2.0 | 0.0 | Maximale Zeit in Sekunden, die nach Auslösen einer Aufnahme im Einzelbild-Modus gewartet wird, bis die Belichtung angepasst ist |
fill |
int32 | 0 | 4 | 3 | Disparitätstoleranz (für das Füllen von Löchern) in Pixeln |
maxdepth |
float64 | 0.1 | 100.0 | 100.0 | Maximaler Abstand in Metern |
maxdeptherr |
float64 | 0.01 | 100.0 | 100.0 | Maximaler Tiefenfehler in Metern |
minconf |
float64 | 0.5 | 1.0 | 0.5 | Mindestkonfidenz |
mindepth |
float64 | 0.1 | 100.0 | 0.1 | Minimaler Abstand in Metern |
quality |
string | - | - | High | Full (Voll), High (Hoch), Medium (Mittel), oder Low (Niedrig). Full benötigt eine ‚StereoPlus‘-Lizenz. |
roi_height |
int32 | 0 | 960 | 0 | Höhe der Region of Interest. 0 für das gesamte Bild. |
roi_offset_x |
int32 | 0 | 1280 | 0 | Erste Spalte der Region of Interest |
roi_offset_y |
int32 | 0 | 960 | 0 | Erste Zeile der Region of Interest |
roi_width |
int32 | 0 | 1280 | 0 | Breite der Region of Interest. 0 für das gesamte Bild. |
seg |
int32 | 0 | 4000 | 200 | Mindestgröße der gültigen Disparitätssegmente in Pixeln |
smooth |
bool | false | true | true | Glättung von Disparitätsbildern (benötigt eine ‚StereoPlus‘-Lizenz) |
static_scene |
bool | false | true | false | Mitteln von Bildern in statischen Szenen, um Rauschen zu reduzieren |
Diese Parameter sind – mit leicht abweichenden Namen und teilweise mit anderen Einheiten oder Datentypen – auch über die GenICam-Schnittstelle verfügbar (siehe GigE Vision 2.0/GenICam-Schnittstelle).
Beschreibung der Laufzeitparameter¶
Jeder Laufzeitparameter ist durch eine eigene Zeile auf der Seite Tiefenbild der Web GUI repräsentiert. Der Web GUI-Name des Parameters ist in Klammern hinter dem Namen des Parameters angegeben und die Parameter werden in der Reihenfolge, in der sie in der Web GUI erscheinen, aufgelistet:
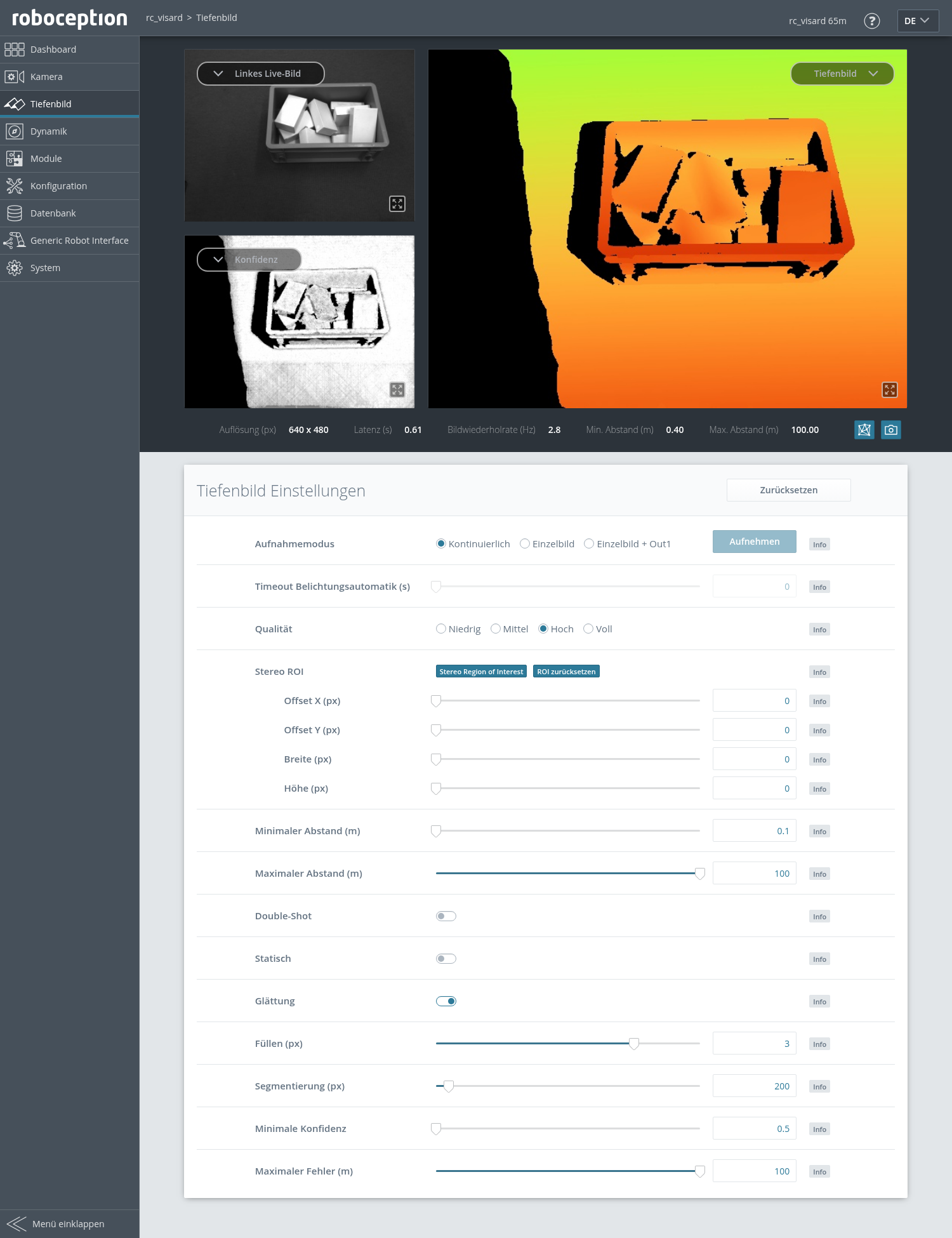
Abb. 18 Seite Tiefenbild der Web GUI
acquisition_mode (Aufnahmemodus)¶
Der Aufnahmemodus kann auf
Continuous(Kontinuierlich),SingleFrame(Einzelbild) oderSingleFrameOut1(Einzelbild + Out1) eingestellt werden. Kontinuierlich ist die Standardeinstellung, bei der das Stereo-Matching kontinuierlich mit der vom Benutzer eingestellten Bildwiederholrate, entsprechend der verfügbaren Rechenressourcen, durchgeführt wird. Bei den beiden anderen Modi wird das Stereo-Matching bei jedem Drücken des Aufnehmen-Knopfes durchgeführt. Der Einzelbild + Out1 Modus kontrolliert zusätzlich einen externen Projektor, falls dieser an GPIO-Ausgang 1 angeschlossen ist (IOControl und Projektor-Kontrolle). In diesem Modus wirdout1_modedes IOControl-Moduls automatisch bei jedem Trigger aufExposureAlternateActiveund nach dem Aufnehmen der Bilder für das Stereo-Matching aufLowgesetzt.Bemerkung
Der Einzelbild + Out1 Modus kann nur dann über
out1_modeeinen Projektor steuern, wenn die IOControl-Lizenz auf dem rc_visard verfügbar ist.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?acquisition_mode=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?acquisition_mode=<value>
exposure_adapt_timeout (Timeout Belichtungsautomatik)¶
Der Timeout für die Belichtungsautomatik gibt die maximale Zeitspanne in Sekunden an, die das System nach dem Auslösen einer Bildaufnahme warten wird, bis die Belichtungsautomatik die optimale Belichtungszeit gefunden hat. Dieser Timeout wird nur im Modus
SingleFrame(Einzelbild) oderSingleFrameOut1(Einzelbild + Out1) bei aktiver Belichtungsautomatik verwendet. Dieser Wert sollte erhöht werden, wenn in Anwendungen mit veränderlichen Lichtbedingungen Bilder unter- oder überbelichtet werden, und das resultierende Disparitätsbild nicht dicht genug ist. In diesem Fall werden mehrere Bilder aufgenommen, bis sich die Belichtungsautomatik angepasst hat oder der Timeout erreicht ist, und erst dann wird die eigentliche Bildaufnahme ausgelöst.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?exposure_adapt_timeout=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?exposure_adapt_timeout=<value>
quality (Qualität)¶
Disparitätsbilder lassen sich in verschiedenen Auflösungen berechnen:
Full(Voll, volle Bildauflösung),High(Hoch, halbe Bildauflösung),Medium(Mittel, Viertel-Bildauflösung) undLow(Niedrig, Sechstel-Bildauflösung). Stereo-Matching mit voller Auflösung (Full) ist nur mit einer gültigen StereoPlus Lizenz möglich. Je niedriger die Auflösung, desto höher die Bildwiederholrate des Disparitätsbilds. Es ist zu beachten, dass die Bildwiederholrate der Disparitäts-, Konfidenz- und Fehlerbilder immer höchstens der Bildwiederholrate der Kamera entspricht. Falls die ProjektoreinstellungExposureAlternateActiveist, kann die Wiederholrate der Bilder höchstens die halbe Bildwiederholrate der Kamera sein.Eine Bildwiederholrate von 25 Hz lässt sich nur bei niedriger Auflösung erreichen.
Wenn volle Auflösung eingestellt ist, dann ist der mögliche Tiefenbereich intern limitiert, aufgrund von beschränktem on-board Speicherplatz. Es wird empfohlen
mindepthandmaxdepthauf den Tiefenbereich anzupassen der für die Applikation benötigt wird.
Tab. 10 Auflösung des Tiefenbilds in Abhängigkeit von der gewählten Qualität¶ Qualität Voll ( Full)Hoch ( High)Mittel ( Medium)Niedrig ( Low)Auflösung (Pixel) 1280 x 960 640 x 480 320 x 240 214 x 160 Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?quality=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?quality=<value>
roi_offset_x, roi_offset_y, roi_width, roi_height (Stereo ROI)¶
Diese Werte definieren eine rechteckige Region im linken rektifizierten Bild, die den Bereich für die Berechnung der Tiefenwerte limitiert. Dadurch verringert sich die Laufzeit für das Stereo Matching und damit auch die Latenz. Falls die Breite oder Höhe auf 0 gesetzt werden, dann wird das gesamte linke und rechte Bild für das Stereomatching verwendet. Standardmäßig sind alle Werte 0.
Die Stereo ROI wird in der Web GUI durch eine weiße Überlagerung des ungenutzten Bildbereichs im linken Kamerabild dargestellt. Sie kann über Slider oder direkt im Bild mithilfe der Schaltfläche
Stereo Region of Interestverändert werden.Über die REST-API können diese Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/services/parameters?<roi_offset_x|roi_offset_y|roi_width|roi_height>=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?<roi_offset_x|roi_offset_y|roi_width|roi_height>=<value>
mindepth (Minimaler Abstand)¶
Dieser Wert bezeichnet den geringsten Abstand zur Kamera, ab dem Messungen möglich sind. Größere Werte verringern implizit den Disparitätsbereich, wodurch sich auch die Rechenzeit verkürzt. Der minimale Abstand wird in Metern angegeben.
Abhängig von den Eigenschaften des Sensors kann der tatsächliche minimale Abstand größer sein als die Benutzereinstellung. Der tatsächliche minimale Abstand wird in den Statuswerten angezeigt.
Wenn volle Auflösung (
Full) eingestellt ist, kann der minimale Abstand auch aufgrund interner Speicherplatzlimitierungen größer sein als die Benutzereinstellung. In diesem Fall hilft es, den maximalen Abstand zu verringern, um dadurch auch den tatsächlichen minimalen Abstand zu verringern.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?mindepth=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?mindepth=<value>
maxdepth (Maximaler Abstand)¶
Dieser Wert ist der größte Abstand zur Kamera, bis zu dem Messungen möglich sind. Pixel mit größeren Distanzwerten werden auf „ungültig“ gesetzt. Wird dieser Wert auf das Maximum gesetzt, so sind Abstände bis Unendlich möglich. Der maximale Abstand wird in Metern angegeben.
Wenn volle Auflösung (
Full) eingestellt ist, kann der minimale Abstand auch aufgrund interner Speicherplatzlimitierungen größer sein als die Benutzereinstellung. In diesem Fall hilft es, den maximalen Abstand zu verringern um dadurch auch den tatsächlichen minimalen Abstand zu verringern.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?maxdepth=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?maxdepth=<value>
double_shot (Double-Shot)¶
Das Aktivieren dieses Modus führt zu dichteren Disparitätsbildern, aber einer erhöhten Verarbeitungszeit.
Bei Szenen, die mit einem Projektor im
Single + Out1Modus oder im kontinuierlichen Modus mit der ProjektoreinstellungExposureAlternateActiveaufgenommen werden, werden Löcher, die durch Projektor-Reflexionen verursacht werden, gefüllt mit Tiefeninformationen aus den Bildern ohne Projektormuster. In diesem Fall darf derdouble_shotModus nur verwendet werden, wenn sich die Szene während der Aufnahme der Bilder nicht verändert.Bei allen anderen Szenen werden Löcher im Disparitätsbild mit Tiefeninformationen aus demselben, herunterskalierten Bild gefüllt.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?double_shot=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?double_shot=<value>
static_scene (Statisch)¶
Mit dieser Option werden acht aufeinanderfolgende Kamerabilder vor dem Matching gemittelt. Dies reduziert Rauschen, was die Qualität des Stereo-Matching-Resultats verbessert. Allerdings erhöht sich auch die Latenz deutlich. Der Zeitstempel des ersten Bildes wird als Zeitstempel für das Disparitätsbild verwendet. Diese Option betrifft nur das Matching in voller und hoher Qualität. Sie darf nur verwendet werden, wenn sich die Szene während der Aufnahme der acht Bilder nicht verändert.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?static_scene=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?static_scene=<value>
smooth (Glättung)¶
Diese Option aktiviert die Glättung von Disparitätswerten. Sie ist nur mit gültiger StereoPlus-Lizenz verfügbar.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?smooth=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?smooth=<value>
fill (Füllen)¶
Diese Option wird verwendet, um Löcher im Disparitätsbild durch Interpolation zu füllen. Der Füllwert gibt die maximale Disparitätsabweichung am Rand des Lochs an. Größere Füllwerte können die Anzahl an Löchern verringern, aber die interpolierten Werte können größere Fehler aufweisen. Maximal 5% der Pixel werden interpoliert. Kleine Löcher werden dabei bevorzugt interpoliert. Die Konfidenz für die interpolierten Pixel wird auf einen geringen Wert von 0,5 eingestellt. Das Auffüllen lässt sich deaktivieren, wenn der Wert auf 0 gesetzt wird.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?fill=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?fill=<value>
seg (Segmentierung)¶
Der Segmentierungsparameter wird verwendet, um die Mindestanzahl an Pixeln anzugeben, die eine zusammenhängende Disparitätsregion im Disparitätsbild ausfüllen muss. Isolierte Regionen, die kleiner sind, werden im Disparitätsbild auf ungültig gesetzt. Der Wert bezieht sich immer auf ein Disparitätsbild mit hoher Qualität (halbe Auflösung) und muss nicht verändert werden, wenn andere Qualitäten gewählt werden. Die Segmentierung eignet sich, um Disparitätsfehler zu entfernen. Bei größeren Werten kann es jedoch vorkommen, dass real vorhandene Objekte entfernt werden.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?seg=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?seg=<value>
minconf (Minimale Konfidenz)¶
Die minimale Konfidenz lässt sich einstellen, um potenziell falsche Disparitätsmessungen herauszufiltern. Dabei werden alle Pixel, deren Konfidenz unter dem gewählten Wert liegt, im Disparitätsbild auf „ungültig“ gesetzt.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?minconf=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?minconf=<value>
maxdeptherr (Maximaler Fehler)¶
Der maximale Fehler wird verwendet, um Messungen, die zu ungenau sind, herauszufiltern. Alle Pixel mit einem Tiefenfehler, der den gewählten Wert überschreitet, werden im Disparitätsbild auf „ungültig“ gesetzt. Der maximale Tiefenfehler wird in Metern angegeben. Der Tiefenfehler wächst in der Regel quadratisch mit dem Abstand eines Objekts zur Kamera (siehe Konfidenz- und Fehlerbilder).
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/parameters/parameters?maxdeptherr=<value>PUT http://<host>/api/v1/nodes/rc_stereomatching/parameters?maxdeptherr=<value>
Statuswerte¶
Dieses Modul meldet folgende Statuswerte:
| Name | Beschreibung |
|---|---|
fps |
Tatsächliche Bildwiederholrate der Disparitäts-, Fehler- und Konfidenzbilder. Dieser Wert wird unter der Bildvorschau in der Web GUI als Bildwiederholrate (Hz) angezeigt. |
latency |
Zeit zwischen Bildaufnahme und Weitergabe des Disparitätsbildes in Sekunden. Dieser Wert wird unter der Bildvorschau in der Web GUI als Latenz (s) angezeigt. |
width |
Aktuelle Breite von Disparitäts-, Fehler- und Konfidenzbild in Pixeln. Dieser Wert wird unter der Bildvorschau in der Web GUI als erster Wert von Auflösung (px) angezeigt. |
height |
Aktuelle Höhe von Disparitäts-, Fehler- und Konfidenzbild in Pixeln. Dieser Wert wird unter der Bildvorschau in der Web GUI als zweiter Wert von Auflösung (px) angezeigt. |
mindepth |
Tatsächlicher minimaler Arbeitsabstand in Metern. Dieser Wert wird unter der Bildvorschau in der Web GUI als Min. Abstand (m) angezeigt. |
maxdepth |
Tatsächlicher maximaler Arbeitsabstand in Metern. Dieser Wert wird unter der Bildvorschau in der Web GUI als Max. Abstand (m) angezeigt. |
time_matching |
Zeit in Sekunden für die Durchführung des Stereo-Matchings mittels SGM auf der GPU |
time_postprocessing |
Zeit in Sekunden für die Nachbearbeitung des Matching-Ergebnisses auf der CPU |
reduced_depth_range |
Gibt an, ob der Tiefenbereich aufgrund von Rechenressourcen verringert ist ist |
Services¶
Das Stereo-Matching-Modul bietet folgende Services.
acquisition_trigger¶
signalisiert dem Modul, das Stereo-Matching auf den nächsten Stereobildern durchzuführen, falls
acquisition_modeaufSingleFrame(Einzelbild) oderSingleFrameOut1(Einzelbild+Out1) eingestellt ist.Details
Es wird ein Fehler zurückgegeben, falls
acquisition_modeaufContinuous(Kontinuierlich) eingestellt ist.Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/services/acquisition_triggerPUT http://<host>/api/v1/nodes/rc_stereomatching/services/acquisition_triggerDieser Service hat keine Argumente.Mögliche Rückgabewerte sind in der Tabelle unten aufgeführt.
Tab. 12 Mögliche Rückgabewerte des acquisition_triggerServiceaufrufs.¶Code Beschreibung 0 Erfolgreich -8 Triggern ist nur im Einzelbild-Modus möglich. 101 Triggern wird ignoriert, da bereits ein anderer Triggeraufruf stattfindet. 102 Triggern wird ignoriert, da keine Empfänger registriert sind. Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "acquisition_trigger", "response": { "return_code": { "message": "string", "value": "int16" } } }
reset_defaults¶
stellt die Werkseinstellungen der Parameter dieses Moduls wieder her und wendet sie an („factory reset“).
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_stereomatching/services/reset_defaultsPUT http://<host>/api/v1/nodes/rc_stereomatching/services/reset_defaultsDieser Service hat keine Argumente.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "reset_defaults", "response": { "return_code": { "message": "string", "value": "int16" } } }
Berechnung von 3D Daten¶
Die folgenden Abschnitte beschreiben, wie Disparitäts-, Fehler- und Konfidenzbilder verwendet werden können, um daraus Tiefendaten und -fehler zu berechnen.
Berechnung von Tiefenbildern und Punktwolken¶
Die folgenden Gleichungen zeigen, wie sich die tatsächlichen 3D-Koordinaten \(P_x, P_y, P_z\) eines Objektpunkts bezogen auf das Kamera-Koordinatensystem aus den Pixelkoordinaten \(p_{x}, p_{y}\) des Disparitätsbilds und dem Disparitätswert \(d\) in Pixeln berechnen lassen:
wobei \(f\) die Brennweite nach der Rektifizierung (in Pixeln) und \(t\) der während der Kalibrierung ermittelte Stereo-Basisabstand (in Metern) ist. Diese Werte werden auch über die GenICam-Schnittstelle zur Verfügung gestellt (siehe Besondere Parameter der GenICam-Schnittstelle des rc_visard).
Bemerkung
Das Kamera-Koordinatensystem des rc_visard ist in Koordinatensysteme definiert.
Bemerkung
Der rc_visard stellt über seine verschiedenen Schnittstellen einen Brennweitenfaktor bereit. Er bezieht sich auf die Bildbreite, um verschiedene Bildauflösungen zu unterstützen. Die Brennweite \(f\) in Pixeln lässt sich leicht bestimmen, indem der Brennweitenfaktor mit der Bildbreite (in Pixeln) multipliziert wird.
Es ist zu beachten, dass für die Gleichungen davon ausgegangen wird, dass das Bildkoordinatensystem im Bildhauptpunkt zentriert ist, der üblicherweise in der Bildmitte liegt, und dass sich \(p_{x}, p_{y}\) auf die Mitte des Pixels bezieht, durch Addieren von 0.5 auf die ganzzahligen Pixelkoordinaten. In der folgenden Abbildung ist die Definition des Bildkoordinatensystems dargestellt.
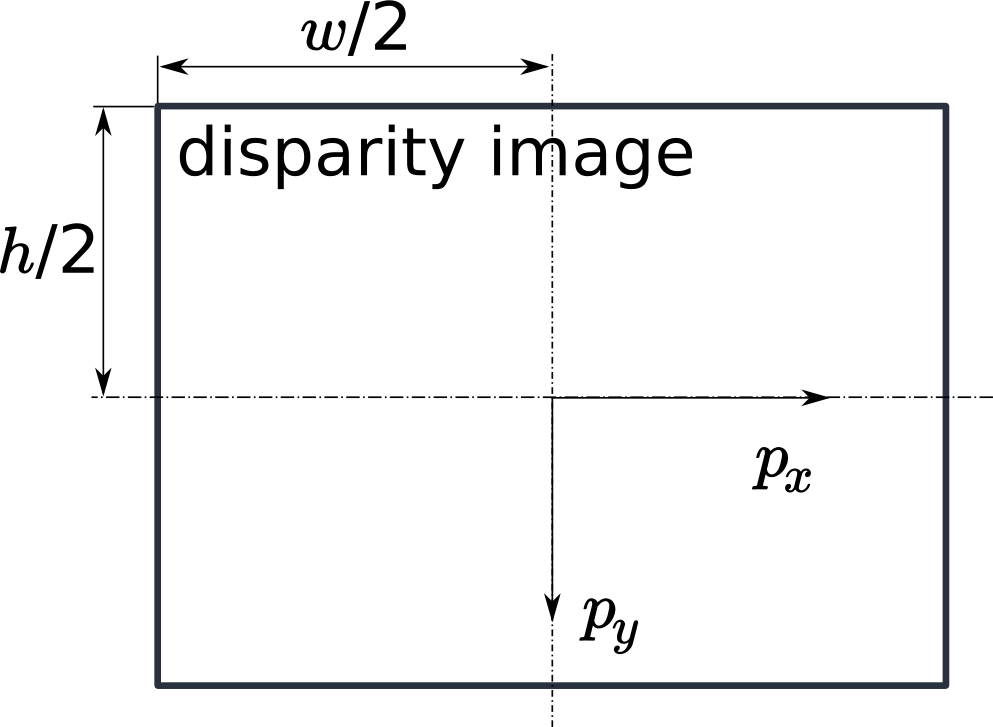
Abb. 19 Bildkoordinatensystem: Der Ursprung des Bildkoordinatensystems befindet sich in der Bildmitte – \(w\) ist die Bildbreite und \(h\) die Bildhöhe.
Die gleichen Formeln, aber mit den entsprechenden GenICam-Parametern, sind in Umwandlung von Bild-Streams angegeben.
Die Gesamtheit aller aus dem Disparitätsbild errechneten Objektpunkte ergibt eine Punktwolke, die für 3D-Modellierungsanwendungen verwendet werden kann. Das Disparitätsbild kann in ein Tiefenbild umgewandelt werden, indem der Disparitätswert jedes Pixels durch den Wert \(P_z\) ersetzt wird.
Bemerkung
Auf der Homepage von Roboception (http://www.roboception.com/download) stehen Software und Beispiele zur Verfügung, um Disparitätsbilder, welche über GigE Vision vom rc_visard empfangen werden, in Tiefenbilder und Punktwolken umzuwandeln.
Konfidenz- und Fehlerbilder¶
Für jedes Disparitätsbild wird zusätzlich ein Fehler- und ein Konfidenzbild zur Verfügung gestellt, um die Unsicherheit jedes einzelnen Disparitätswerts anzugeben. Fehler- und Konfidenzbilder besitzen die gleiche Auflösung und Bildwiederholrate wie das Disparitätsbild. Im Fehlerbild ist der Disparitätsfehler \(d_{eps}\) in Pixeln angegeben. Er bezieht sich auf den Disparitätswert an der gleichen Bildkoordinate im Disparitätsbild. Das Konfidenzbild gibt den entsprechenden Konfidenzwert \(c\) zwischen 0 und 1 an. Die Konfidenz gibt an, wie wahrscheinlich es ist, dass der wahre Disparitätswert innerhalb des Intervalls des dreifachen Fehlers um die gemessene Disparität \(d\) liegt, d.h. \([d-3d_{eps}, d+3d_{eps}]\). So lässt sich das Disparitätsbild mit Fehler- und Konfidenzwerten in Anwendungen einsetzen, für die probabilistische Folgerungen nötig sind. Die Konfidenz- und Fehlerwerte für eine ungültige Disparitätsmessung betragen 0.
Der Disparitätsfehler \(d_{eps}\) (in Pixeln) lässt sich mithilfe der Brennweite \(f\) (in Pixeln), des Basisabstands \(t\) (in Metern) und des Disparitätswerts \(d\) (in Pixeln) desselben Pixels im Disparitätsbild in einen Tiefenfehler \(z_{eps}\) (in Metern) umrechnen:
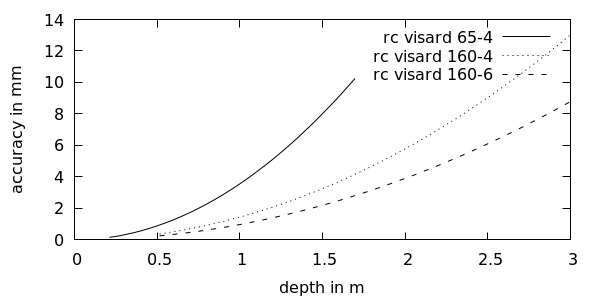
Durch Kombination der Gleichungen kann der Tiefenfehler zur Tiefe in Bezug gebracht werden:
Unter Berücksichtigung der Brennweiten und Basisabstände der verschiedenen Kameramodelle sowie des typischen kombinierten Kalibrier- und Stereo-Matching-Fehlers \(d_{eps}\) von 0,25 Pixeln lässt sich die Tiefengenauigkeit wie folgt grafisch darstellen:
Anzeigen und Herunterladen von Tiefenbildern und Punktwolken¶
Der rc_visard stellt zeitgestempelte Disparitäts-, Fehler- und Konfidenzbilder über die GenICam-Schnittstelle (siehe Verfügbare Bild-Streams) oder über gRPC Bilddatenschnittstelle zur Verfügung.
Live-Streams in geringerer Qualität werden auf der Tiefenbild Seite in der Web GUI bereitgestellt.
Die Web GUI bietet weiterhin die Möglichkeit, einen Schnappschuss der aktuellen Szene mit den Tiefen-, Fehler und Konfidenzbildern, sowie der Punktwolke als .tar.gz-Datei zu speichern, wie in Herunterladen von Kamerabildern beschrieben wird.