Sensor dynamics¶
The dynamics module is a base module which is available on every rc_visard and provides estimates of the sensor state. These include pose, linear velocity, linear acceleration, and rotational rates. The module handles starting and stopping, and streaming of the estimates for individual subcomponents:
- Visual odometry (
rc_stereovisodo) - estimates the camera’s motion from the motion of characteristic image points in the left camera images.
- Visual odometry (
- Stereo INS (
rc_stereo_ins) - combines visual odometry measurements with readings from an inertial measurement unit (IMU) to provide accurate, high-frequency state estimates in real time.
- Stereo INS (
Note
Using Stereo matching in parallel to the dynamics module may lead to decreased localization accuracy. See Visual odometry for how to avoid this.
Coordinate frames for state estimation¶
The world coordinate frame for state estimation is defined as follows: The coordinate frame’s z-axis points upward and is aligned with the gravity vector. The x-axis is orthogonal to the z-axis and points in the rc_visard’s viewing direction at the time when the pose estimation starts. The world frame’s origin is located at the origin of the rc_visard’s IMU coordinate frame at the instant when state estimation is switched on.
If pose estimation is switched on when the rc_visard’s viewing direction parallels the gravity vector (with a tolerance range of 10 degrees), then the world coordinate frame’s y-axis is aligned either with the IMU’s positive or negative x-axis. In this orientation, the initial alignment of the world coordinate frame is no longer continuous. Thus, special care has to be taken when pose estimation has to be started at such an orientation.

Fig. 22 Coordinate frames for state estimation. The IMU coordinate frame is inside the rc_visard’s housing. The camera coordinate frame is in the focal point of the left camera.
The transformation between the IMU coordinate frame and the camera/sensor frame is also estimated and provided in the real-time dynamics stream over the rc_dynamics interface (see Interfaces).
Warning
The stereo INS module self-calibrates the IMU during its initialization. It is therefore required that the rc_visard is not moving and sufficient texture is visible during startup of the stereo INS module.
Available state estimates¶
The rc_visard provides seven different kinds of timestamped state-estimate data streams via the rc_dynamics interface (see The rc_dynamics interface):
| Name | Frequency | Source | Description |
|---|---|---|---|
| pose | 25 Hz | best effort | Pose of camera frame, slightly delayed but most accurate |
| pose_ins | 25 Hz | Stereo INS | Pose of camera frame, slightly delayed but most accurate |
| pose_rt | 200 Hz | best effort | Pose of camera frame |
| pose_rt_ins | 200 Hz | Stereo INS | Pose of camera frame |
| dynamics | 200 Hz | best effort | Pose, velocity and acceleration in IMU frame |
| dynamics_ins | 200 Hz | Stereo INS | Pose, velocity and acceleration in IMU frame |
| imu | 200 Hz | Stereo INS | Raw IMU data |
Best effort here means that if SLAM is running, then it contains the loop-closure corrected estimates and is equivalent to the stream from Stereo INS when SLAM is not running.
Camera-pose streams (pose and pose_ins)¶
The camera-pose streams called pose and pose_ins are provided at 25 Hz with
timestamps that correspond to image timestamps. The
former stream is the best-effort estimate, combining SLAM and Stereo INS if the SLAM module is
running. If SLAM is not running, then both data streams are equivalent. Pose
values are given in world coordinates, and also refer to the rc_visard’s camera
frame origin
(see Coordinate frames for state estimation).
They are the
most accurate estimates, taking all available rc_visard information into consideration.
They can be used in modeling applications, where camera images, depth images,
or point clouds have to be aligned highly accurately with each other. To ensure
the greatest possible accuracy, these pose values are delayed until a corresponding
visual odometry measurement is available.
Real-time camera-pose streams (pose_rt and pose_rt_ins)¶
Two real-time pose streams called pose_rt and pose_rt_ins are provided at the IMU rate of 200 Hz. The
former stream is the best-effort estimate, combining SLAM and Stereo INS when the SLAM module is
running. If SLAM is not running, then both data streams are equivalent. They consist of the
pose estimates of the rc_visard’s camera frame origin (see Coordinate frames for state estimation)
in world coordinates. The
values given in these streams correspond to the values in the real-time dynamics streams,
but give the pose of the sensor/camera coordinate frame instead of that of the IMU coordinate frame.
Real-time dynamics streams (dynamics and dynamics_ins)¶
Two real-time dynamics streams called dynamics and dynamics_ins are provided at the IMU rate of 200 Hz. The
former stream is the best-effort estimate, combining SLAM and Stereo INS when the SLAM module is
running. If SLAM is not running, then both data streams are equivalent. The
estimates can be used for real-time control of a robot. Since the values are provided
in real time and visual odometry computation requires some processing time,
the latest visual odometry estimate may not be included.
Therefore, these estimates are in general slightly less accurate than those in the
non-real-time camera-pose streams (see above), but are the best estimates
available at this instant. The provided dynamics streams contain the rc_visard’s
- translation \(\mathbf{p} = (x, y, z)^T\) in \(m\),
- rotation \(\mathbf{q} = (q_x, q_y, q_z, q_w)\) as unit quaternion,
- linear velocities \(\mathbf{v} = (v_x, v_y, v_z)^T\) in \(\frac{m}{s}\),
- angular velocities \(\mathbf{\omega} = (\omega_x, \omega_y, \omega_z)^T\) in \(\frac{rad}{s}\),
- gravity-compensated linear accelerations \(\mathbf{a} = (a_x, a_y, a_z)^T\) in \(\frac{m}{s^2}\), and
- transformation from camera to IMU coordinate frame as pose with frame name and parent frame name.
For each module, the stream also provides the name of the coordinate frame in which the values are given. Translation, rotation, and linear velocities are given in the world frame; angular velocities and accelerations are given in the IMU frame (see Coordinate frames for state estimation). All values refer to the IMU frame’s origin. That means, for example, that linear velocity is the velocity of the IMU frame’s origin in the world frame.
Lastly, the stream contains a possible_jump flag, which is set to true whenever
the optional SLAM module (see SLAM)
corrects the state estimation after finding a loop
closure. The state estimate can jump in this case, which should be considered when
the values are used in a control loop. If SLAM is not running, the jump flag can be
ignored and will stay false.
IMU data stream (imu)¶
The IMU data stream called imu is provided at the IMU rate of 200 Hz. It consists of the
acceleration in x, y, z directions plus the angular velocities around these three axis.
The values are calibrated but not bias- and gravity-compensated, and are given in the IMU frame. The transformation
between IMU and sensor frame is provided in the real-time dynamics stream.
Status values¶
This module reports the following status values:
| Name | Description |
|---|---|
state |
The current state of the rc_dynamics node |
Services¶
The sensor dynamics module offers the following services for starting dynamics/motion estimation. All services return a numerical code of the entered state. The meaning of the returned state codes and names are given in Table 15.
| State name | Description |
|---|---|
| IDLE | The module is ready, but idle |
| WAITING_FOR_INS | Waiting for stereo INS to start up |
| WAITING_FOR_INS_AND_SLAM | Waiting for stereo INS and SLAM to start up |
| RUNNING | The stereo INS module is running (SLAM is not running) |
| WAITING_FOR_SLAM | Waiting for SLAM to start up (stereo INS is running) |
| RUNNING_WITH_SLAM | Both stereo INS and SLAM are running |
| STOPPING | Transitional state when going to (or through IDLE) |
| FATAL | A fatal error has occurred (either in stereo INS or SLAM) |
The following diagram shows the main states and transitions. Intermediate states and the fatal error state are omitted for conceptual clarity.
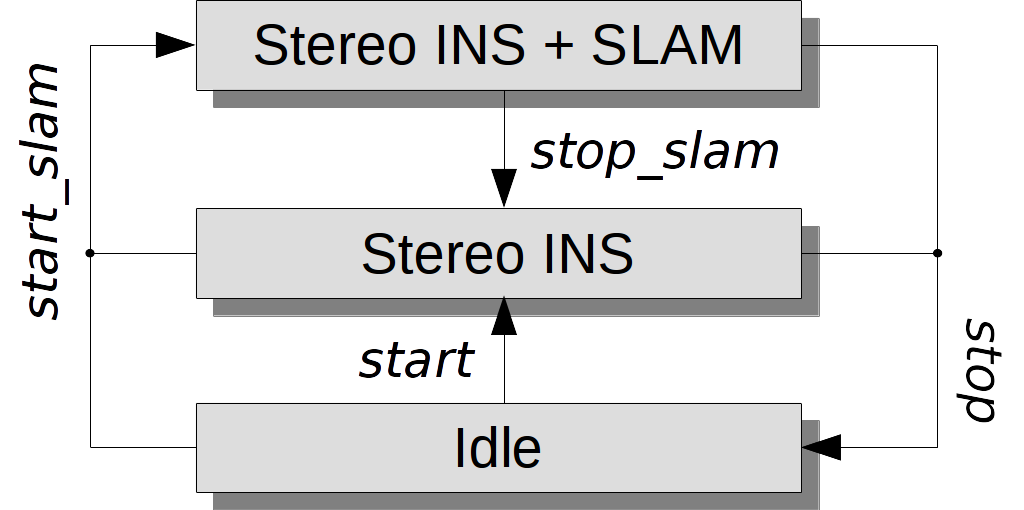
Fig. 23 Simplified state and transition diagram
These services shall respond quickly. Therefore, for services that cause a state transition
the value of the returned current_state in general is the first new (intermediate) state that was
transitioned to, not the final state.
E.g., for the start command the returned current_state will be WAITING_FOR_INS, not state
RUNNING. If the transition does not take place within 0.1 seconds, the
current state is returned. See Table 15 for the meaning of the returned state codes.
Note
The state FATAL can only be left by calling stop, which performs
a transition to the state IDLE. The services restart and
restart_slam internally use stop and will also work as
expected. start and start_slam only work if the state is
IDLE, and do nothing if the state is FATAL.
Note
The dynamics modules can also be started and stopped on the Dynamics page of the Web GUI.
start¶
Starts the stereo INS module.
Details
Transitions from state
IDLEthroughWAITING_FOR_INStoRUNNING.This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_dynamics/services/startPUT http://<host>/api/v1/nodes/rc_dynamics/services/startThis service has no arguments.The definition for the response with corresponding datatypes is:
{ "name": "start", "response": { "accepted": "bool", "current_state": "string" } }
start_slam¶
Starts the SLAM and – if not yet started – the stereo INS module.
Details
From state
IDLE: Transitions throughWAITING_FOR_INS_AND_SLAMandWAITING_FOR_SLAMtoRUNNING_WITH_SLAM. From stateRUNNING: Transitions throughWAITING_FOR_SLAMtoRUNNING_WITH_SLAM.This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_dynamics/services/start_slamPUT http://<host>/api/v1/nodes/rc_dynamics/services/start_slamThis service has no arguments.The definition for the response with corresponding datatypes is:
{ "name": "start_slam", "response": { "accepted": "bool", "current_state": "string" } }
stop¶
Stops the stereo INS and – if running – the SLAM modules.
Details
The trajectory estimate of the SLAM module will still be available. Transitions from state
RUNNINGorRUNNING_WITH_SLAMthroughSTOPPINGtoIDLE.This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_dynamics/services/stopPUT http://<host>/api/v1/nodes/rc_dynamics/services/stopThis service has no arguments.The definition for the response with corresponding datatypes is:
{ "name": "stop", "response": { "accepted": "bool", "current_state": "string" } }
stop_slam¶
Stops the SLAM module. Stereo INS will continue to run.
Details
The trajectory estimate of the SLAM module will still be available. Transitions from state
RUNNING_WITH_SLAMtoRUNNING.This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_dynamics/services/stop_slamPUT http://<host>/api/v1/nodes/rc_dynamics/services/stop_slamThis service has no arguments.The definition for the response with corresponding datatypes is:
{ "name": "stop_slam", "response": { "accepted": "bool", "current_state": "string" } }
restart¶
Restarts to stereo INS. Equivalent to successive
stopandstart.Details
From state
RUNNINGorRUNNING_WITH_SLAM: Transitions through statesSTOPPING,IDLEandWAITING_FOR_INStoRUNNING.This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_dynamics/services/restartPUT http://<host>/api/v1/nodes/rc_dynamics/services/restartThis service has no arguments.The definition for the response with corresponding datatypes is:
{ "name": "restart", "response": { "accepted": "bool", "current_state": "string" } }
restart_slam¶
Restarts to SLAM mode. Equivalent to successive
stopandstart_slam.Details
From state
RUNNINGorRUNNING_WITH_SLAM: Transitions through statesSTOPPING,IDLE,WAITING_FOR_INS_AND_SLAM,WAITING_FOR_SLAMtoRUNNING_WITH_SLAM.This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_dynamics/services/restart_slamPUT http://<host>/api/v1/nodes/rc_dynamics/services/restart_slamThis service has no arguments.The definition for the response with corresponding datatypes is:
{ "name": "restart_slam", "response": { "accepted": "bool", "current_state": "string" } }
get_cam2imu_transform¶
returns the transformation from camera to IMU coordinate frame.
Details
This is equivalent to the
cam2imu_transformin the Dynamics message.This service can be called as follows.
PUT http://<host>/api/v2/pipelines/0/nodes/rc_dynamics/services/get_cam2imu_transformPUT http://<host>/api/v1/nodes/rc_dynamics/services/get_cam2imu_transformThis service has no arguments.The definition for the response with corresponding datatypes is:
{ "name": "get_cam2imu_transform", "response": { "name": "string", "parent": "string", "pose": { "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "timestamp": { "nsec": "int32", "sec": "int32" } }, "return_code": { "message": "string", "value": "int16" } } }