Web GUI¶
Die Web GUI des rc_visard dient dazu, das Gerät zu testen, zu kalibrieren und zu konfigurieren.
Zugriff auf die Web GUI¶
Auf die Web GUI kann über die IP-Adresse des rc_visard von jedem Webbrowser aus zugegriffen werden, z.B. Firefox, Google Chrome oder Microsoft Edge. Am einfachsten lässt sich die Web GUI über die rcdiscover-gui aufrufen, wenn, wie in Aufspüren von rc_visard-Geräten beschrieben, ein Doppelklick auf das gewünschte Gerät vorgenommen wird.
Alternativ konfigurieren einige Netzwerkumgebungen den eindeutigen Host-Namen des rc_visard automatisch in ihrem Domain Name Server (DNS). In diesem Fall kann die Web GUI auch direkt über folgende URL aufgerufen werden: http://<host-name>, wobei der Platzhalter <host-name> gegen den Host-Namen des Geräts auszutauschen ist.
Für Linux und macOS funktioniert das ohne DNS über das Multicast-DNS-Protokoll (mDNS), das automatisch aktiviert wird, wenn .local zum Host-Namen hinzugefügt wird. So wird die URL einfach zu: http://<host-name>.local.
Kennenlernen der Web GUI¶
Die Dashboard-Seite der Web GUI enthält die wichtigsten Informationen über das Gerät und die Softwaremodule.
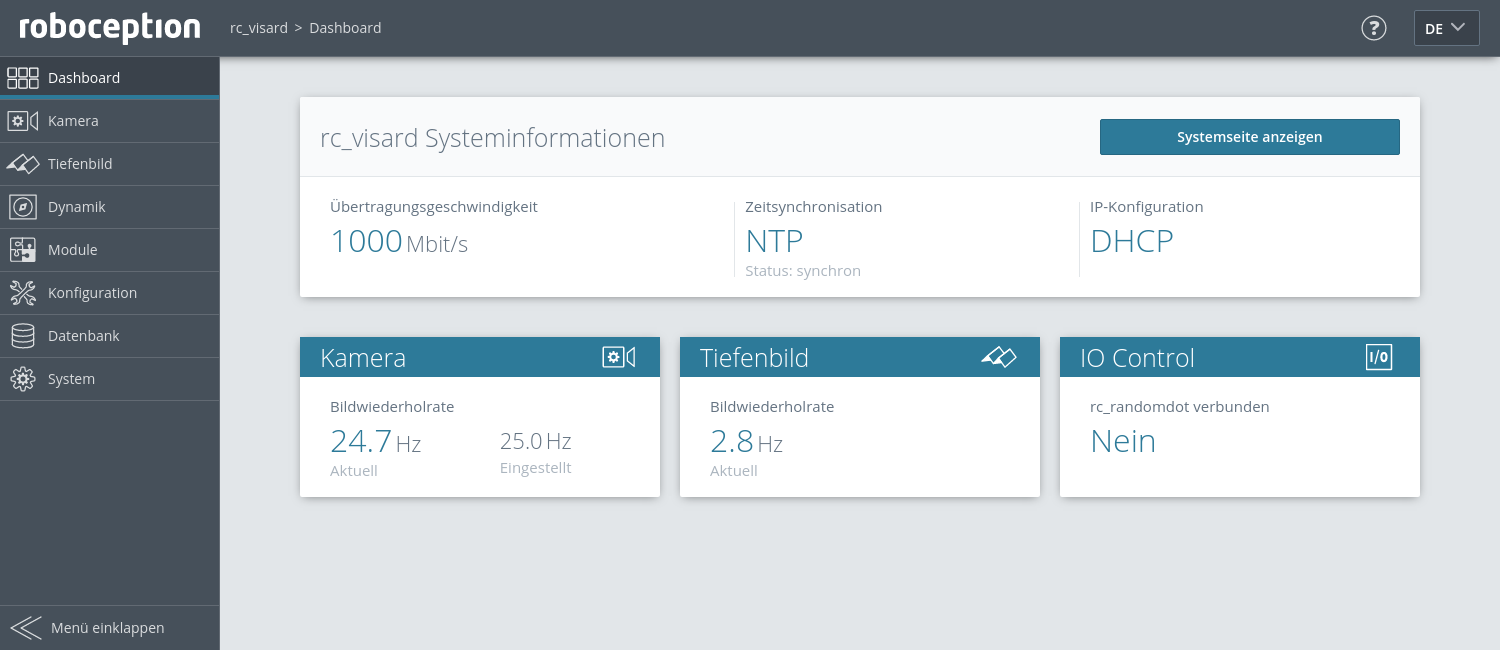
Abb. 65 Dashboard-Seite der Web GUI des rc_visard
Über das Menü kann auf die einzelnen Seiten der Web GUI des rc_visard zugegriffen werden:
- Kamera
- zeigt einen Live-Stream der rektifizierten Kamerabilder. Die Bildwiederholrate lässt sich reduzieren, um Bandbreite zu sparen, wenn über einen GigE Vision®-Client gestreamt wird. Außerdem lässt sich die Belichtung manuell oder automatisch einstellen. Für nähere Informationen siehe Parameter.
- Tiefenbild
- bietet einen Live-Stream der rektifizierten Bilder der linken Kamera sowie Disparitäts- und Konfidenzbilder. Auf der Seite lassen sich verschiedene Einstellungen zur Berechnung und Filterung von Tiefenbildern vornehmen. Für nähere Informationen siehe Parameter.
- Dynamik
- zeigt die für die Schätzung der Eigenbewegung des rc_visard relevante Position und Bewegung visueller Merkmale. Über entsprechende Einstellungen lässt sich u. a. die Anzahl der zu dieser Schätzung herangezogenen Merkmale anpassen. Für nähere Informationen siehe Parameter.
- Module
- ermöglicht den Zugriff auf die Detektionsmodule des rc_visard (siehe Detektionsmodule).
- Konfiguration
- ermöglicht den Zugriff auf die Konfigurationsmodule des rc_visard (siehe Konfigurationsmodule).
- Datenbank
- ermöglicht den Zugriff auf die Datenbankmodule des rc_visard (siehe Datenbankmodule).
- System
- ermöglicht dem Nutzer den Zugriff auf allgemeine Systemeinstellungen, Informationen zum Gerät und den Log-Dateien, sowie die Möglichkeit, die Firmware oder Lizenzdatei zu aktualisieren.
Bemerkung
Weitere Informationen zu den einzelnen Parametern der Web GUI lassen sich über die jeweils daneben angezeigte Schaltfläche Info aufrufen.
Herunterladen von Kamerabildern¶
Die Web GUI bietet eine einfache Möglichkeit, einen Schnappschuss der aktuellen Szene als .tar.gz-Datei zu speichern. Dazu dient das Kamerasymbol unterhalb der Live-Streams auf der Seite Kamera. Dieser Schnappschuss beinhaltet:
- die rektifizierten Kamerabilder in voller Auflösung als .png-Dateien,
- eine Kameraparameter-Datei mit Kameramatrix, Bildabmessungen, Belichtungszeit, Verstärkungsfaktor und Basisabstand der Kameras.
- die aktuellen IMU-Messungen als imu.csv-Datei,
- eine pipeline_status.json-Datei mit Informationen aller 3D-Kamera-, Detektions- und Konfigurationsmodule, die auf dem rc_visard laufen,
- eine backup.json-Datei mit den Einstellungen des rc_visard einschließlich konfigurierter Greifer, Load Carrier und Regions of Interest,
- eine system_info.json-Datei mit Systeminformationen des rc_visard.
Die Dateinamen enthalten die Zeitstempel.
Herunterladen von Tiefenbildern und Punktwolken¶
Die Web GUI bietet eine einfache Möglichkeit, die Tiefendaten der aktuellen Szene als .tar.gz-Datei zu speichern. Dazu dient das Kamerasymbol unterhalb der Live-Streams auf der Seite Tiefenbild. Dieser Schnappschuss beinhaltet:
- die rektifizierten linken und rechten Kamerabilder in voller Auflösung als .png-Dateien,
- eine Parameterdatei für das linke Kamerabild mit Kameramatrix, Bildabmessungen, Belichtungszeit, Verstärkungsfaktor und Basisabstand der Kameras,
- die Disparitäts-, Fehler- und Konfidenzbilder in der Auflösung, die der aktuell eingestellten Qualität entspricht, als .png-Dateien,
- eine Parameterdatei zum Disparitätsbild mit Kameramatrix, Bildabmessungen, Belichtungszeit, Verstärkungsfaktor und Basisabstand der Kameras, sowie Informationen über die Disparitätswerte (ungültige Werte, Skalierung, Offset),
- die aktuellen IMU-Messungen als imu.csv-Datei,
- eine pipeline_status.json-Datei mit Informationen aller 3D-Kamera-, Detektions- und Konfigurationsmodule, die auf dem rc_visard laufen,
- eine backup.json-Datei mit den Einstellungen des rc_visard einschließlich konfigurierter Greifer, Load Carrier und Regions of Interest,
- eine system_info.json-Datei mit Systeminformationen des rc_visard.
Die Dateinamen enthalten die Zeitstempel.
Durch Klick auf das Mesh-Symbol unterhalb der Live-Streams auf der Seite Tiefenbild kann man einen Schnappschuss herunterladen, der zusätzlich ein Mesh der Punktwolke in der aktuell eingestellten Auflösung (Qualität) als *.ply Datei enthält.
Bemerkung
Das Herunterladen der Tiefenbilder löst eine Bildaufnahme aus, in der gleichen Weise wie ein Klick auf den „Aufnehmen“-Button auf der Tiefenbild-Seite der Web GUI. Dies kann einen Einfluss auf laufende Anwendungen haben.