Softwaremodule¶
Der rc_visard wird mit verschiedenen integrierten Softwaremodulen ausgeliefert, mit denen sich Kamerabilder, 3D-Informationen und Dynamik-Zustandsschätzungen bereitstellen und Kalibrierungen vornehmen lassen. Jedes Softwaremodul entspricht einem node in der REST-API-Schnittstelle. Abb. 18 gibt einen Überblick über die Beziehungen zwischen den verschiedenen Softwaremodulen und den Daten, die sie über die verschiedenen Schnittstellen des rc_visard bereitstellen.
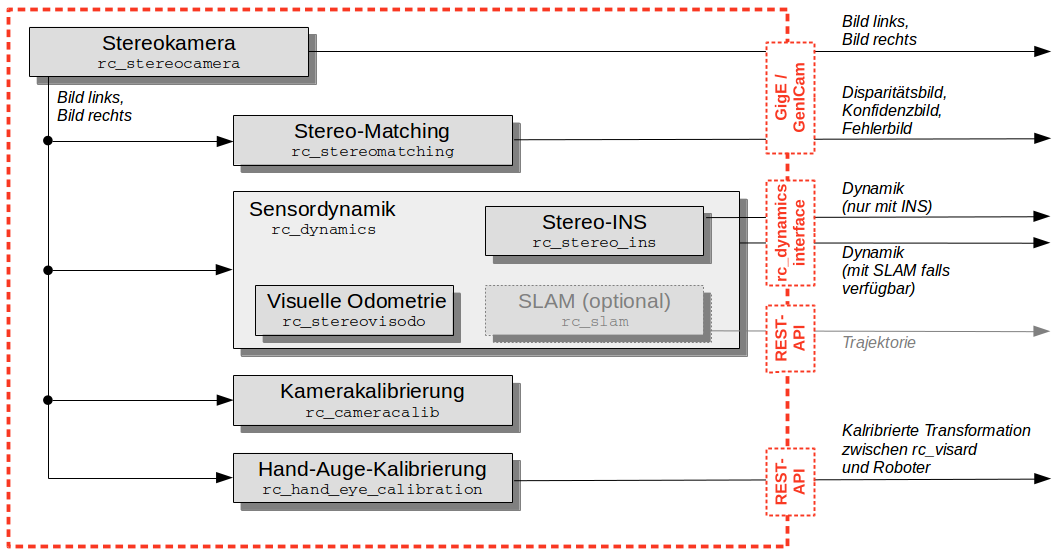
Abb. 18 Flussdiagramm der Softwaremodule mit den zugehörigen Modulnamen und den wichtigsten Ausgabedaten
Bemerkung
Module, die mit optional gekennzeichnet sind, erweitern die Funktionalität des rc_visard. Kunden können ihre Lizenz erweitern, um zusätzliche Module zu erwerben.
Die integrierte Software des rc_visard umfasst folgende Module:
- Stereokamera (
rc_stereocamera) - erfasst Stereo-Bildpaare und führt die planare Rektifizierung durch, wodurch die Stereokamera als Messinstrument verwendet werden kann. Bilder werden sowohl für die weitere interne Verarbeitung durch andere Module als auch als GenICam-Bildstrom für die externe Verwendung bereitgestellt.
- Stereokamera (
- Stereo-Matching (
rc_stereomatching) - nutzt das rektifizierte Stereo-Bildpaar, um 3D-Tiefeninformationen, z. B. für Disparitäts-, Fehler- und Konfidenzbilder, zu berechnen. Diese werden auch als GenICam-Bildströme bereitgestellt.
- Stereo-Matching (
- Sensordynamik (
rc_dynamics) - erstellt Schätzungen zum dynamischen Zustand des rc_visard, z. B. zu seiner Pose, Geschwindigkeit und Beschleunigung. Diese Zustände werden als kontinuierliche Datenströme über die rc_dynamics-Schnittstelle übertragen. Zu diesem Zweck verwaltet und verknüpft das Dynamik-Modul Daten aus den folgenden Submodulen:
- Visuelle Odometrie (
rc_stereovisodo) - schätzt die Bewegung des rc_visard auf der Grundlage der Bewegungen charakteristischer Merkmale in den Bildern der linken Kamera.
- Visuelle Odometrie (
- Stereo-INS (
rc_stereo_ins) - kombiniert die per visueller Odometrie ermittelten Werte mit den Daten der integrierten inertialen Messeinheit (IMU), um auf dieser Grundlage akkurate und hochfrequente Echtzeit-Zustandsschätzungen bereitzustellen.
- Stereo-INS (
- Sensordynamik (
- Kamerakalibrierung (
rc_cameracalib) - überprüft automatisch die Kalibrierung der Stereokamera des rc_visard und führt die Selbstkalibrierung durch, sofern sich diese verstellt hat. Mit diesem Modul kann der Benutzer zudem eine manuelle Neukalibrierung über die Web GUI vornehmen.
- Kamerakalibrierung (
- Hand-Auge-Kalibrierung (
rc_hand_eye_calibration) - ermöglicht dem Benutzer, den rc_visard entweder über die Web GUI oder die REST-API zu einem Roboter zu kalibrieren.
- Hand-Auge-Kalibrierung (