ItemPick¶
Einführung¶
Das ItemPick-Modul ist eine optional erhältliche Komponente, welche intern auf dem rc_visard läuft.
Hinweis
Das ItemPick-Modul ist optional und benötigt eine gesonderte Lizenz .
ItemPick liefert eine gebrauchsfertige, modellfreie Perzeptionslösung, um robotische Pick-and-Place-Anwendungen für Vakuum-Greifsysteme zu realisieren. Dazu analysiert die Komponente die sichtbare 3D-Szene, extrahiert mittels Clustering-Verfahren ebene Greifoberflächen und berechnet daraus mögliche 3D-Greifposen für die Positionierung des Sauggreifers.
Zusätzlich bietet das ItemPick-Modul folgende Funktionen:
- eine intuitiv gestaltete Bedienoberfläche für Inbetriebnahme, Konfiguration und Test auf der rc_visard Web GUI
- die Möglichkeit, sogenannte Regions of Interest (ROIs) zu definieren, um relevante Teilbereiche der Szene auszuwählen
- eine integrierte Behältererkennung, um in Bin-Picking-Anwendungen („Griff in die Kiste“) Greifpunkte nur für Objekte in dem erkannten Behälter zu berechnen
- die Unterstützung von Behältern mit Fächern, so dass Greifpunkte für Objekte nur in einem definierten Teilvolumen des Behälters berechnet werden
- die Unterstützung von sowohl statisch montierten als auch robotergeführten rc_visard Sensoren. Optional kann es mit der Hand-Auge-Kalibrierung kombiniert werden, um Greifposen in einem benutzerdefinierten externen Koordinatensystem zu liefern.
- einen Qualitätswert für jeden vorgeschlagenen Greifpunkt, der die Eignung der für das Greifen verfügbaren Oberfläche bewertet
- die Sortierung der berechneten Greifpunkte an Hand des Gravitationsvektors, so dass bei gestapelten Objekten zuerst die oberen gegriffen werden
Hinweis
Im Kontext des ItemPick-Moduls werden die Begriffe „Cluster“, „Greiffläche“, und „Oberfläche“ synonym verwendet und bezeichnen zusammenhängende Punkte oder Pixel mit ähnlichen geometrischen Eigenschaften.
Hinweis
Im Kontext des ItemPick-Moduls werden die Begriffe „Lagerkiste“, „Bin“ und „Load Carrier“ synonym verwendet und bezeichnen einen Behälter mit vier Wänden, einem Boden und einem rechteckigen Rand.
Datentypen¶
Region of Interest¶
Eine sogenannte Region of Interest (ROI) definiert ein abgegrenztes, für eine spezifische Anwendung relevantes Raumvolumen. Aktuell unterstützt das ItemPick-Modul folgende unterschiedliche Arten von ROIs:
BOX, für quaderförmige ROIs mit den Abmessungenbox.x,box.y,box.z.SPHERE, für kugelförmige ROIs mit dem Radiussphere.radius.
Die Pose pose einer ROI kann entweder relativ zum Kamera-Koordinatensystem (camera) oder im mit Hilfe der Hand-Auge-Kalibrierung definierten externen Koordinatesystem (external) angegeben werden (siehe Hand-Auge-Kalibrierung).
Das ItemPick-Modul erlaubt das Speichern von bis zu 10 verschiedenen ROIs, von denen jede mit einer id versehen ist. Die Konfiguration von ROIs kann mit Hilfe der rc_visard Web GUI oder der REST-API vorgenommen werden.
Hinweis
Die erstellten ROIs sind persistent auf dem rc_visard gespeichert und – im Gegenzug zu den Laufzeitparametern des Moduls – auch nach Firmware-Updates und -Wiederherstellungen verfügbar.
Je nach Anwendungsfall schränkt eine ROI entweder den Suchbereich für die Bin-Erkennung oder den Bereich, in dem Greifpunkte für Objekte berechnet werden sollen, ein.
Hinweis
Wird keine ROI verwendet, legt das ItemPick-Modul den gesamten sichtbaren Bereich für die Berechnungen zu Grunde. Speziell für die Greifpunktberechnung bedeutet dies, dass aus allen sichtbaren Oberflächen potentiell Greifpunkte resultieren können.
Load Carrier¶
Ein sogenannter Load Carrier (auch „Bin“ oder „Lagerkiste“) ist ein Behälter mit vier Wänden, einem Boden und einem rechteckigen Rand, aus dem Objekte gegriffen bzw. in welchen Objekte abgelegt werden können. Im ItemPick-Modul ist seine Geometrie definiert durch die Angaben zu inneren und äußeren Abmessungen inner_dimensions und outer_dimensions.
Der Erkennungsalgorithmus basiert auf der Erkennung des oberen, rechteckigen Randes (engl. rim) des Behälters. Für Standardbehälter wird dessen Stärke rim_thickness aus der Differenz von inner_dimensions und outer_dimensions berechnet. Für Nicht-Standardbehälter kann dieser Wert alternativ vom Nutzer auch explizit gesetzt werden.
Hinweis
Die Innen- und Außenmaße eines Behälters sind typischerweise in den Angaben des jeweiligen Herstellers spezifiert, und können im Produktblatt oder der Produktseite nachgeschlagen werden.
Im ItemPick-Modul ist das Referenzkoordinatensystem für Behälter so definiert, dass dessen Urprung im Zentrum des durch die Außenmaße definierten Quaders liegt. Dabei zeigt die z-Achse senkrecht aus dem Behälter hinaus und die x-Achse entlang der längsten Seite.

Abb. 50 Illustration verschiedener Behälter-Modelle und des Referenzkoordinatensystems.
Um Mehrdeutigkeiten bei der Lageschätzung der Behältererkennung zu umgehen, kann eine grobe Vorgabe für die Pose pose des Behälters spezifiziert werden. Wird keine angegeben, sucht der Algorithmus standardmäßig nach Behältern, die horizontal zum Gravitationsvektor stehen.
Das ItemPick-Modul erlaubt das Speichern von bis zu 10 verschiedenen Behältern, von denen jeder mit einer id versehen ist. Die für eine spezifische Anwendung relevanten Behälter können mit Hilfe der rc_visard Web GUI oder der REST-API konfiguriert werden.
Hinweis
Die konfigurierten Behälter sind persistent auf dem rc_visard gespeichert und – im Gegenzug zu den Laufzeitparametern des Moduls – auch nach Firmware-Updates und -Wiederherstellungen verfügbar.
Das ItemPick-Modul bietet die Möglichkeit, die Greifpunktberechnung auf einen benutzerdefinierten Teilbereich des detektierten Behälters einzuschränken – beispielsweise für in Fächer oder Abteile unterteilte Behälter. Solche Unterabteile (load_carrier_compartment) können als Quader mit den Abmessungen box.x, box.y und box.z sowie mit einer Pose pose relativ zum Referenzkoordinatensystem des Behälters definiert werden.

Abb. 51 Benutzerdefinierter Teilbereich eines Behälters.
Greifpunkt für Vakuum-Greifsysteme¶
Ein vom ItemPick-Modul ermittelter Greifpunkt definiert die Position und Stellung des TCP (Tool Center Point) des Sauggreifers sowie die für den Sauger zur Verfügung stehende Greiffläche. Die Orientierung des TCP ist so angegeben, dass die z-Achse orthogonal zur Greiffläche in das zu greifende Objekt zeigt und die x-Achse entlang der längsten Ausdehnung ausgerichtet ist.
Für jeden Greifpunkt liegt der Ursprung der Greifpose pose im Mittelpunkt der größten von der jeweiligen Greiffläche umschlossenen Ellipse.
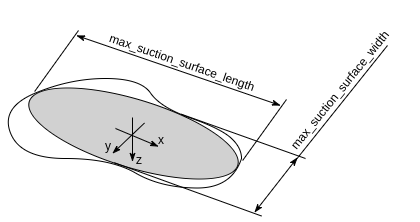
Abb. 52 Veranschaulichung eines vom ItemPick-Modul berechneten Greifpunktes mit Greifpose und der zugehörigen Ellipse, welche die Greiffläche bestmöglich beschreibt.
Zusätzlich enthält jeder Greifpunkt eine geometrische Beschreibung der errechneten Greiffläche in Form von Achslängen max_suction_surface_length und max_suction_surface_width derjenigen Ellipse, welche die Greiffläche bestmöglich beschreibt. Die Berechnung von Greifpunkten berücksichtigt vom Nutzer angegebene, durch die Geometrie des Sauggreifers bedingte Minimalanforderungen an diese Achslängen. Zu kleine Greifflächen können damit bereits während der Berechnung herausgefiltert werden.
Jeder berechnete Greifpunkt lässt sich an Hand einer uuid (Universally Unique Identifier) eindeutig identifizieren und enthält zusätzlich einen Zeitstempel der Bildaufnahme, die der Greifpunktberechnung zu Grunde lag (bei mehreren Bildern, der Zeitstempel des ältesten Bildes).
Objektmodell¶
Liegen Informationen über die Geometrien der zu greifenden Objekte vor, können diese vom Nutzer an das ItemPick-Modul übergegeben und somit für die Greifpunktberechnung berücksichtigt werden. Jedes solcher item_models enthält die Angaben über den Geometrietyp und über die minimalen und maximalen Abmessungen des jeweiligen Objekts.
Aktuell werden folgende Objektgeometrien unterstützt:
UNKNOWN, für bewegliche und/oder verformbare Objekte.BOX, für quaderförmige, nicht verformbare Objekte.
Wechselwirkung mit anderen Modulen¶
Die folgenden, intern auf dem rc_visard laufenden Komponenten liefern Daten für das ItemPick-Modul oder haben Einfluss auf die Datenverarbeitung.
Hinweis
Jedwede Konfigurationsänderung dieser Komponenten kann direkte Auswirkungen auf die Qualität oder das Leistungsverhalten der Greifpunktberechnung zur Folge haben.
Stereokamera und Stereo-Matching¶
Folgende Daten werden vom ItemPick-Modul verarbeitet:
- Die rektifizierten Bilder des Stereokamera-Moduls (
rc_stereocamera); - Die Disparitäts-, Konfidenz- und Fehlerbilder des Stereo-Matching-Moduls (
rc_stereomatching).
Sensordynamik¶
Jedes Mal, wenn eine Behältererkennung oder Greifpunktberechnung durchgeführt wird, schätzt das ItemPick-Modul die Gravitationsrichtung basierend auf den IMU Daten der Sensordynamik-Komponente (rc_dynamics).
Hinweis
Für eine korrekte Schätzung der Gravitationsrichtung muss der rc_visard still stehen.
IO und Projektor-Kontrolle¶
Für den Anwendungsfall, dass der rc_visard zusammen mit einem externen Projektor mit Zufallsmuster und dem Modul für IO und Projektor-Kontrolle (rc_iocontrol) betrieben wird, sollte der entsprechende digitale Ausgang in den Betriebsmodus ExposureAlternateActive geschaltet werden, siehe Beschreibung der Laufzeitparameter des IO und Projektor-Kontrolle-Moduls.
Darüber hinaus sind keine weiteren Änderungen für diesen Anwendungsfall notwendig.
Hand-Auge-Kalibrierung¶
Für den Anwendungsfall, dass der rc_visard zu einem Roboter-Koordinatensystem kalibriert ist, kann zwischen den folgenden zwei Optionen für das Referenzkoordinatensystem pose_frame gewählt werden:
- Kamera-Koordinatensystem (
camera): Alle Posen sind im Kamera-Koordinatensystem angegeben. Das gilt sowohl für Posen, welche vom Nutzer an das ItemPick-Modul übermittelt werden, als auch für Posen, welche die Komponente berechnet und an den Nutzer zurückgibt. In diesem Fall ist kein zusätzliches Wissen über die Lage des rc_visard in seiner Umgebung notwendig. Das bedeutet insbesondere, dass sich ROIs oder Behälter, welche in diesem Koordinatensystem angegeben sind, im Zweifel mit dem rc_visard bewegen. Es liegt daher in der Verantwortung des Anwenders, in solchen Fällen die entsprechenden Posen der Situation entsprechend zu aktualisieren (beispielsweise für den Anwendungsfall eines robotergeführten Sensors). - Benutzerdefiniertes externes Koordinatensystem (
external). Alle Posen sind im sogenannten externen Koordinatensystem angegeben, welches vom Nutzer während der Hand-Auge-Kalibrierung gewählt wurde. In diesem Fall, bezieht das ItemPick-Modul alle notwendigen Informationen über die Sensormontage und die kalibrierte Hand-Auge-Transformation automatisch vom Modul zur handeye_calibration. Für den Fall eines robotergeführten rc_visard ist vom Nutzer zusätzlich die jeweils aktuelle Roboterposerobot_poseanzugeben.
Hinweis
Ist der rc_visard aktuell nicht mittels der Hand-Auge-Kalibrierung kalibriert, muss als Referenzkoordinatensystem pose_frame immer camera angegeben werden.
Zulässige Werte zur Angabe des Referenzkoordinatensystems sind nur camera und external. Andere Werte werden vom ItemPick-Modul als ungültig zurückgewiesen.
Parameter und Statuswerte¶
Die verschiedenen Laufzeitparameter und Konfigurationsoptionen des ItemPick-Modules können sowohl über die Web GUI als auch über die Swagger UI des rc_visard auspropiert und getestet werden. Der entsprechene Komponentenname des ItemPick-Moduls in der REST-API ist rc_itempick.
Dieses Softwaremodul bietet folgende Laufzeitparameter.
| Name | Typ | Min | Max | Default | Beschreibung |
|---|---|---|---|---|---|
max_grasps |
int32 | 1 | 20 | 5 | Maximale Anzahl von bereitgestellten Greifpunkten |
| Name | Typ | Min | Max | Default | Beschreibung |
|---|---|---|---|---|---|
load_carrier_crop_distance |
float64 | 0.0 | 0.02 | 0.005 | Sicherheitspielraum in Meter, um den die inneren Abmesssungen eines detektierten Behälters verringert werden, bevor sie als interne ROI für die nachfolgende Greifpunktberechnung gesetzt werden. |
load_carrier_model_tolerance |
float64 | 0.003 | 0.025 | 0.008 | Zulässige maximale Abweichung zwischen den geschätzten Abmessungen eines detektierten Behälters und den vom Nutzer definierten Abmessungen des jeweiligen Behälter-Modells in Metern. Behälter deren Abmessungen stärker abweichen, werden nicht als solche erkannt. |
| Name | Typ | Min | Max | Default | Beschreibung |
|---|---|---|---|---|---|
cluster_max_dimension |
float64 | 0.05 | 0.8 | 0.3 | Größenbeschränkung für mögliche Greifflächen in Metern. Flächen, die nicht durch einen Kreis dieses Durchmessers umschrieben werden können, werden aussortiert. |
cluster_max_curvature |
float64 | 0.005 | 0.5 | 0.11 | Maximal erlaubte Krümmung für Greifflächen. Je kleiner dieser Wert ist, desto mehr mögliche Greifflächen werden in kleinere Flächen mit weniger Krümmung aufgeteilt. |
clustering_patch_size |
int32 | 3 | 10 | 4 | Pixelgröße der Patches für die Unterteilung des Tiefenbildes im ersten Clustering-Schritt. |
clustering_max_surface_rmse |
float64 | 0.0005 | 0.01 | 0.004 | Maximal erlaubte Abweichung (Root Mean Square Error, RMSE) von Punkten zur Greiffläche in Metern. |
clustering_discontinuity_factor |
float64 | 0.5 | 5.0 | 1.0 | Dieser Wert beschreibt die erlaubte Unebenheit von Greifflächen. Je kleiner dieser Wert ist, umso mehr werden mögliche Greifflächen in kleinere Flächen mit weniger Unebenheiten aufgeteilt. |
item_model_tolerance |
float64 | 0.003 | 0.05 | 0.005 | Zulässige maximale Abweichung zwischen den geschätzten Abmessungen eines detektierten Greifobjekts und den jeweiligen vom Nutzer definierten Abmessungen in Metern. Objekte deren Abmessungen stärker abweichen, werden nicht für die Greifpunktberechnung berücksichtigt. |
Dieses Modul meldet folgende Statuswerte:
| Name | Beschreibung |
|---|---|
state |
Aktueller Zustand des Moduls |
last_timestamp_processed |
Zeitstempel des letzten verarbeiteten Bilddatensatzes |
data_acquisition_time |
Zeit in Sekunden, für die beim letzten Aufruf auf Bilddaten gewartet werden musste. Normalerweise sollte dieser Wert zwischen 0.5 und 0.6 Sekunden bei Tiefenbildern der Auflösung High liegen. |
load_carrier_detection_time |
Berechnungszeit für die Behältererkennung beim letzten Aufruf in Sekunden |
grasp_computation_time |
Berechnungszeit für die Greifpunktberechnung beim letzten Aufruf in Sekunden |
Folgende, verschiedene state-Werte werden vom ItemPick-Modul gemeldet.
| Zustand | Beschreibung |
|---|---|
| IDLE | Das Modul ist inaktiv. |
| RUNNING | Das Modul wurde gestartet und ist bereit, Behälter zu erkennen und Greifpunkte zu berechnen. |
| FATAL | Ein schwerwiegender Fehler ist aufgetreten. |
Services¶
Die zur Verfügung stehenden Services des rc_itempick-Moduls können mit Hilfe der Swagger UI oder der rc_visard Web GUI ausprobiert und getestet werden.
Zusätzlich zur eigentlichen Serviceantwort gibt jeder Service einen sogenannten return_code bestehend aus einem Integer-Wert und einer optionalen Textnachricht zurück.
Erfolgreiche Service-Anfragen werden mit einem Wert von 0 quittiert. Positive Werte bedeuten, dass die Service-Anfrage zwar erfolgreich bearbeitet wurde, aber zusätzliche Informationen zur Verfügung stehen. Negative Werte bedeuten, dass Fehler aufgetreten sind. Für den Fall, dass mehrere Rückgabewerte zutreffend wären, wird der kleinste zurückgegeben; die entsprechenden Textnachrichten werden aber alle in return_code.message akkumuliert.
Die folgende Tabelle führt die möglichen Rückgabe-Codes an:
| Code | Beschreibung |
|---|---|
| 0 | Erfolgreich |
| -1 | Ungültige(s) Argument(e) |
| -4 | Die maximal erlaubte Zeitspanne von 1.5 Sekunden für die interne Ackquise der Bilddaten wurde überschritten. |
| -301 | Für die Anfrage zur Greifpunktberechnung compute_grasps wurden mehrere Objektmodelle (item_models) als Argument übergeben. Momentan wird nur eines gleichzeitig unterstützt. |
| -302 | Für die Anfrage zur Behälterkennung detect_load_carriers wurden im Argument load_carrier_ids mehrere Behälter angegeben. Momentan wird nur einer gleichzeitig unterstützt. |
| 100 | Die angefragten Behälter wurden in der Szene nicht gefunden. |
| 101 | Es wurden keine gültigen Greifflächen in der Szene gefunden. |
| 102 | Der detektierte Behälter ist leer. |
| 200 | Die ItemPick-Komponente befindet sich im Zustand IDLE. |
| 300 | Ein gültiges robot_pose-Argument wurde angegeben, ist aber nicht erforderlich. |
| 400 | Der Serviceanfrage compute_grasps wurden keine Objektangaben item_models als Argumente mitgegeben. |
| 500 | Während des Aufrufs von set_region_of_interest konnten keine entsprechenden Visualisierungen erzeugt werden. |
| 600 | Mit dem Aufruf von set_load_carrier oder set_region_of_interest wurde ein bereits existierendes Objekt mit übergebener id überschrieben. |
Dieses Softwaremodul stellt folgende Services zur Verfügung.
startVersetzt das ItemPick-Modul in den Zustand
RUNNING. Es kann vorkommen, dass der Zustandsübergang noch nicht vollständig abgeschlossen ist, wenn die Serviceantwort generiert wird. In diesem Fall liefert diese den entsprechenden, sich vonRUNNINGunterscheidenden Zustand zurück.Für diesen Service sind keine Argumente nötig.
Dieser Service liefert folgenden Rückgabewert:
{ "accepted": "bool", "current_state": "string" }
stopStoppt das Modul und versetzt es in den Zustand
IDLE. Es kann vorkommen, dass der Zustandsübergang noch nicht vollständig abgeschlossen ist, wenn die Serviceantwort generiert wird. In diesem Fall liefert diese den entsprechenden, sich vonIDLEunterscheidenden Zustand zurück.Für diesen Service sind keine Argumente nötig.
Dieser Service liefert folgenden Rückgabewert:
{ "accepted": "bool", "current_state": "string" }
set_region_of_interestKonfiguriert und speichert eine Region of Interest (ROI) auf dem rc_visard. Alle ROIs sind dauerhaft – auch über Firmware-Updates und -Wiederherstellungen hinweg – gespeichert.
Vergleiche hierzu die exakte Definition und Beschreibung einer Region of Interest.
Für diesen Service sind folgende Argumente nötig:
{ "region_of_interest": { "box": { "x": "float64", "y": "float64", "z": "float64" }, "id": "string", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "sphere": { "radius": "float64" }, "type": "string" }, "robot_pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } } }
Dieser Service liefert folgenden Rückgabewert:
{ "return_code": { "message": "string", "value": "int16" } }
get_regions_of_interestGibt die mit
region_of_interest_idsspezifizierten, gespeicherten Regions of Interest (ROIs) zurück. Werden keineregion_of_interest_idsangegeben, enthält die Serviceantwort alle gespeicherten ROIs.Für diesen Service sind folgende Argumente nötig:
{ "region_of_interest_ids": [ "string" ] }
Dieser Service liefert folgenden Rückgabewert:
{ "regions_of_interest": [ { "box": { "x": "float64", "y": "float64", "z": "float64" }, "id": "string", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "sphere": { "radius": "float64" }, "type": "string" } ], "return_code": { "message": "string", "value": "int16" } }
delete_regions_of_interestLöscht die mit
region_of_interest_idsspezifizierten, gespeicherten ROIs. Alle zu löschenden ROIs müssen explizit angegeben werden.Für diesen Service sind folgende Argumente nötig:
{ "region_of_interest_ids": [ "string" ] }
Dieser Service liefert folgenden Rückgabewert:
{ "return_code": { "message": "string", "value": "int16" } }
set_load_carrierKonfiguriert und speichert einen Load Carrier (Behälter) auf dem rc_visard. Alle Behälter sind dauerhaft – auch über Firmware-Updates und -Wiederherstellungen hinweg – gespeichert.
Vergleiche hierzu die exakte Definition und Beschreibung eines Load Carrier.
Für diesen Service sind folgende Argumente nötig:
{ "load_carrier": { "id": "string", "inner_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "outer_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rim_thickness": { "x": "float64", "y": "float64" } } }
Dieser Service liefert folgenden Rückgabewert:
{ "return_code": { "message": "string", "value": "int16" } }
get_load_carriersGibt die mit
load_carrier_idsspezifizierten, gespeicherten Load Carriers (Behälter) zurück. Werden keineload_carrier_idsangegeben, enthält die Serviceantwort alle gespeicherten Behälter.Für diesen Service sind folgende Argumente nötig:
{ "load_carrier_ids": [ "string" ] }
Dieser Service liefert folgenden Rückgabewert:
{ "load_carriers": [ { "id": "string", "inner_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "outer_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rim_thickness": { "x": "float64", "y": "float64" } } ], "return_code": { "message": "string", "value": "int16" } }
delete_load_carriersLöscht die mit
load_carrier_idsspezifizierten, gespeicherten Load Carriers (Behälter). Alle zu löschenden Behälter müssen explizit angegeben werden.Für diesen Service sind folgende Argumente nötig:
{ "load_carrier_ids": [ "string" ] }
Dieser Service liefert folgenden Rückgabewert:
{ "return_code": { "message": "string", "value": "int16" } }
detect_load_carriersMit dieser Serviceanfrage wird eine Behältererkennung durchgeführt. Dabei garantiert das Zeitverhalten dieses Services, dass nur Bilddaten zur Erkennung benutzt werden, welche nach dem Anfragezeitpunkt generiert wurden.
Für diesen Service sind folgende Argumente nötig:
{ "load_carrier_ids": [ "string" ], "pose_frame": "string", "region_of_interest_id": "string", "robot_pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } } }
Dieser Service liefert folgenden Rückgabewert:
{ "load_carriers": [ { "id": "string", "inner_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "outer_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rim_thickness": { "x": "float64", "y": "float64" } } ], "return_code": { "message": "string", "value": "int16" }, "timestamp": { "nsec": "int32", "sec": "int32" } }
Obligatorische Serviceargumente:
pose_frame: wird nur benötigt, wenn das Referenzkoordinatensystem nicht bereits durch die Nutzung einer ROI oder eines Behälter mit Posen-Vorgabe klar definiert ist. Falls er dennoch angegeben ist, muss er mit dem bereits definierten übereinstimmen.load_carrier_idsrobot_pose: wird nur für den Fall eines robotergeführten rc_visard mit Referenzkoordinatensystempose_frame="external"benötigt.Optionale Serviceargumente:
region_of_interest_id: schränkt die Suche nach zu detektierenden Behältern auf das durch die ROI definierte Raumvolumen ein. Je größer eine ROI, desto mehr Rechenzeit wird für die Behältererkennung benötigt.
compute_graspsMit dieser Serviceanfrage wird eine Greifpunktberechnung durchgeführt. Dabei garantiert das Zeitverhalten dieses Services, dass nur Bilddaten zur Erkennung benutzt werden, welche nach dem Anfragezeitpunkt generiert wurden. Mit der Serviceantwort wird eine sortierte Liste von Greifpunkten und – je nach Anwendungsfall – auch der detektierte Behälter zurückgegeben.
Für diesen Service sind folgende Argumente nötig:
{ "item_models": [ { "box": { "max_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "min_dimensions": { "x": "float64", "y": "float64", "z": "float64" } }, "type": "string", "unknown": { "max_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "min_dimensions": { "x": "float64", "y": "float64", "z": "float64" } } } ], "load_carrier_compartment": { "box": { "x": "float64", "y": "float64", "z": "float64" }, "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } } }, "load_carrier_id": "string", "pose_frame": "string", "region_of_interest_id": "string", "robot_pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "suction_surface_length": "float64", "suction_surface_width": "float64" }
Dieser Service liefert folgenden Rückgabewert:
{ "grasps": [ { "max_suction_surface_length": "float64", "max_suction_surface_width": "float64", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "quality": "float64", "timestamp": { "nsec": "int32", "sec": "int32" }, "type": "string", "uuid": "string" } ], "load_carriers": [ { "id": "string", "inner_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "outer_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rim_thickness": { "x": "float64", "y": "float64" } } ], "return_code": { "message": "string", "value": "int16" }, "timestamp": { "nsec": "int32", "sec": "int32" } }
Obligatorische Serviceargumente:
pose_frame: wird nur benötigt, wenn das Referenzkoordinatensystem nicht bereits durch die Nutzung einer ROI oder eines Behälter mit Posen-Vorgabe klar definiert ist. Falls er dennoch angegeben ist, muss er mit dem bereits definierten übereinstimmen.suction_surface_length: Länge der Greiffläche des verwendeten Vakuum-Greifsystems.suction_surface_width: Breite der Greiffläche des verwendeten Vakuum-Greifsystems.robot_pose: wird nur für den Fall eines robotergeführten rc_visard mit Referenzkoordinatensystempose_frame="external"benötigt.Optionale Serviceargumente:
region_of_interest_id: schränkt je nach Anwendungsfall entweder die Suche nach zu detektierenden Behältern oder direkt die Suche nach Greifpunkten auf das durch die ROI definierte Raumvolumen ein. Je größer eine ROI, desto mehr Rechenzeit wird für die Berechnungen benötigt.load_carrier_id: beschränkt die Greifpunktberechnung auf den Inhalt des zu detektierenden Load Carriers (Behälters).load_carrier_compartment: beschränkt die Greifpunktberechnung auf das mit diesem Serviceargument definierte Teilvolumen (Fach bzw. Abteil) in einem zu detektierenden Load Carrier (Behälter).item_models: Liste mit spezifischen Angaben zu Objektgeometrien. Momentan wird nur die gleichzeitige Angabe eines Objektmodells unterstützt.
save_parameters- Beim Aufruf dieses Services werden die aktuellen Parametereinstellungen des ItemPick-Moduls auf dem rc_visard gespeichert. Das bedeutet, dass diese Werte selbst nach einem Neustart angewandt werden. Bei Firmware-Updates oder -Wiederherstellungen werden sie jedoch wieder auf den Standardwert gesetzt.
reset_to_defaults- Hiermit werden die Werkseinstellungen der Parameter dieses Moduls wiederhergestellt und angewandt („factory reset“). Dies betrifft nicht die konfigurierten ROIs und Load Carrier.