REST-API interface¶
Besides the GenICam interface, the rc_visard offers a comprehensive RESTful web interface (REST-API) which any HTTP client or library can access. Whereas most of the provided parameters, services, and functionalities can also be accessed via the user-friendly Web GUI, the REST-API serves rather as a machine-to-machine interface to programmatically
- set and get run-time parameters of computation nodes, e.g., of cameras, disparity calculation, and visual odometry;
- do service calls, e.g., to start and stop individual computational nodes, or to use offered services such as the hand-eye calibration;
- configure data streams that provide rc_visard’s dynamic state estimates as described in The rc_dynamics interface;
- read the current state of the system and individual computational nodes; and
- update the rc_visard’s firmware or license.
Note
In the rc_visard’s REST-API, a node is a computational component that bundles certain algorithmic functionality and offers a holistic interface (parameters, services, current status). Examples for such nodes are the stereo matching node or the visual odometry node.
General API structure¶
The general entry point to the rc_visard’s API is http://<rcvisard>/api/,
where <rcvisard> is either the device’s IP address or its host name as known
by the respective DHCP server, as explained in
network configuration.
Accessing this entry point with a web browser lets the user explore and test
the full API during run-time using the Swagger UI
.
For actual HTTP requests, the current API version is appended to the entry point
of the API, i.e., http://<rcvisard>/api/v1. All data sent to and
received by the REST-API follows the JavaScript Object Notation (JSON).
The API is designed to let the user create, retrieve, modify, and delete
so-called resources as listed in Available resources and requests using the HTTP requests below.
| Request type | Description |
|---|---|
| GET | Access one or more resources and return the result as JSON. |
| PUT | Modify a resource and return the modified resource as JSON. |
| DELETE | Delete a resource. |
| POST | Upload file (e.g., license or firmware image). |
Depending on the type and the specific request itself, arguments to HTTP requests can be transmitted as part of the path (URI) to the resource, as query string, as form data, or in the body of the request. The following examples use the command line tool curl, which is available for various operating systems. See https://curl.haxx.se.
Get a node’s current status; its name is encoded in the path (URI)
curl -X GET 'http://<rcvisard>/api/v1/nodes/rc_stereomatching'Get values of some of a node’s parameters using a query string
curl -X GET 'http://<rcvisard>/api/v1/nodes/rc_stereomatching/parameters?name=minconf&name=maxdepth'Configure a new datastream; the destination parameter is transmitted as form data
curl -X PUT --header 'Content-Type: application/x-www-form-urlencoded' -d 'destination=10.0.1.14%3A30000' 'http://<rcvisard>/api/v1/datastreams/pose'
Set a node’s parameter as JSON-encoded text in the body of the request
curl -X PUT --header 'Content-Type: application/json' -d '[{"name": "mindepth", "value": 0.1}]' 'http://<rcvisard>/api/v1/nodes/rc_stereomatching/parameters'
As for the responses to such requests, some common return codes for the rc_visard’s API are:
| Status Code | Description |
|---|---|
200 OK |
The request was successful; the resource is returned as JSON. |
400 Bad Request |
A required attribute or argument of the API request is missing or invalid. |
404 Not Found |
A resource could not be accessed; e.g., an ID for a resource could not be found. |
403 Forbidden |
Access is (temporarily) forbidden; e.g., some parameters are locked while a GigE Vision application is connected. |
429 Too many requests |
Rate limited due to excessive request frequency. |
The following listing shows a sample response to a successful request that accesses
information about the rc_stereomatching node’s minconf parameter:
HTTP/1.1 200 OK
Content-Type: application/json
Content-Length: 157
{
"name": "minconf",
"min": 0,
"default": 0,
"max": 1,
"value": 0,
"type": "float64",
"description": "Minimum confidence"
}
Note
The actual behavior, allowed requests, and specific return codes depend heavily on the specific resource, context, and action. Please refer to the rc_visard’s available resources and to each software component’s parameters and services.
Available resources and requests¶
The available REST-API resources are structured into the following parts:
/nodes: Access the rc_visard’s software components with their run-time status, parameters, and offered services./datastreams: Access and manage data streams of the rc_visard’s The rc_dynamics interface ./logs: Access the log files on the rc_visard./system: Access the system state and manage licenses as well as firmware updates.
Nodes, parameters, and services¶
Nodes represent the rc_visard’s software components , each bundling a certain algorithmic functionality. All available REST-API nodes can be listed with their service calls and parameters using
curl -X GET http://<rcvisard>/api/v1/nodes
Information about a specific node (e.g., rc_stereocamera) can be retrieved using
curl -X GET http://<rcvisard>/api/v1/nodes/rc_stereocamera
- Status:
During run-time, each node offers information about its current status. This includes not only the current processing status of the component (e.g.,
runningorstale), but most nodes also offer run-time statistics or read-only parameters, so-called status values. As an example, therc_stereocameravalues can be retrieved usingcurl -X GET http://<rcvisard>/api/v1/nodes/rc_stereocamera/status
Note
The returned status values are specific to individual nodes and are documented in the respective software component .
Note
The status values are only reported when the respective node is in the
runningstate.
- Parameters:
Most nodes expose parameters via the rc_visard’s REST-API to allow their run-time behaviors to be changed according to application context or requirements. The REST-API permits to read and write a parameter’s value, but also provides further information such as minimum, maximum, and default values.
As an example, the
rc_stereomatchingparameters can be retrieved usingcurl -X GET http://<rcvisard>/api/v1/nodes/rc_stereomatching/parameters
Its
medianparameter could be set to 3 usingcurl -X PUT --header 'Content-Type: application/json' -d '{ "value": 3 }' http://<rcvisard>/api/v1/nodes/rc_stereomatching/parameters/median
Note
Run-time parameters are specific to individual nodes and are documented in the respective software component .
Note
Most of the parameters that nodes offer via the REST-API can be explored and tested via the rc_visard’s user-friendly Web GUI .
Note
Some parameters exposed via the rc_visard’s REST-API are also available from the GigE Vision 2.0/GenICam image interface . Please note that setting those parameters via the REST-API is prohibited if a GenICam client is connected.
In addition, each node that offers run-time parameters also features services to save, i.e., persist, the current parameter setting, or to restore the default values for all of its parameters.
- Services:
Some nodes also offer services that can be called via REST-API, e.g., to save and restore parameters as discussed above, or to start and stop nodes. As an example, the services of pose estimation (see Stereo INS), could be listed using
curl -X GET http://<rcvisard>/api/v1/nodes/rc_stereo_ins/services
A node’s service is called by issuing a
PUTrequest for the respective resource and providing the service-specific arguments (see the"args"field of the Service data model). As an example, egomotion estimation can be switched on by:curl -X PUT --header 'Content-Type: application/json' -d '{ "args": {} }' http://<rcvisard>/api/v1/nodes/rc_dynamics/services/start
Note
The services and corresponding argument data models are specific to individual nodes and are documented in the respective software component .
The following list includes all REST-API requests regarding the node’s status, parameters, and services calls:
-
GET/nodes¶ Get list of all available nodes.
Template request
GET /api/v1/nodes HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json [ { "name": "rc_stereocalib", "parameters": [ "grid_width", "grid_height", "snap" ], "services": [ "save_parameters", "reset_defaults", "change_state" ], "status": "stale" }, { "name": "rc_stereocamera", "parameters": [ "fps", "exp_auto", "exp_value", "exp_max" ], "services": [ "save_parameters", "reset_defaults" ], "status": "running" }, { "name": "rc_hand_eye_calibration", "parameters": [ "grid_width", "grid_height", "robot_mounted" ], "services": [ "save_parameters", "reset_defaults", "set_pose", "reset", "save", "calibrate", "get_calibration" ], "status": "stale" }, { "name": "rc_stereo_ins", "parameters": [], "services": [], "status": "stale" }, { "name": "rc_stereomatching", "parameters": [ "force_on", "quality", "disprange", "seg", "median", "fill", "minconf", "mindepth", "maxdepth", "maxdeptherr" ], "services": [ "save_parameters", "reset_defaults" ], "status": "running" }, { "name": "rc_stereovisodo", "parameters": [ "disprange", "nkey", "ncorner", "nfeature" ], "services": [ "save_parameters", "reset_defaults" ], "status": "stale" } ]
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns array of NodeInfo)
Referenced Data Models:
-
GET/nodes/{node}¶ Get info on a single node.
Template request
GET /api/v1/nodes/<node> HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "name": "rc_stereocamera", "parameters": [ "fps", "exp_auto", "exp_value", "exp_max" ], "services": [ "save_parameters", "reset_defaults" ], "status": "running" }
Parameters: - node (string) – name of the node (required)
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns NodeInfo)
- 404 Not Found – node not found
Referenced Data Models:
-
GET/nodes/{node}/parameters¶ Get parameters of a node.
Template request
GET /api/v1/nodes/<node>/parameters?name=<name> HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json [ { "default": 25, "description": "Frames per second in Hz", "max": 25, "min": 1, "name": "fps", "type": "float64", "value": 25 }, { "default": true, "description": "Switching between auto and manual exposure", "max": true, "min": false, "name": "exp_auto", "type": "bool", "value": true }, { "default": 0.007, "description": "Maximum exposure time in s if exp_auto is true", "max": 0.018, "min": 6.6e-05, "name": "exp_max", "type": "float64", "value": 0.007 } ]
Parameters: - node (string) – name of the node (required)
Query Parameters: - name (string) – limit result to parameters with name (optional)
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns array of Parameter)
- 404 Not Found – node not found
Referenced Data Models:
-
PUT/nodes/{node}/parameters¶ Update multiple parameters.
Template request
PUT /api/v1/nodes/<node>/parameters HTTP/1.1 Host: <rcvisard> Accept: application/json [ { "name": "string", "value": {} } ]
Sample response
HTTP/1.1 200 OK Content-Type: application/json [ { "default": 25, "description": "Frames per second in Hz", "max": 25, "min": 1, "name": "fps", "type": "float64", "value": 10 }, { "default": true, "description": "Switching between auto and manual exposure", "max": true, "min": false, "name": "exp_auto", "type": "bool", "value": false }, { "default": 0.005, "description": "Manual exposure time in s if exp_auto is false", "max": 0.018, "min": 6.6e-05, "name": "exp_value", "type": "float64", "value": 0.005 } ]
Parameters: - node (string) – name of the node (required)
Request JSON Array of Objects: - parameters (Parameter) – array of parameters (required)
Request Headers: - Accept – application/json
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns array of Parameter)
- 404 Not Found – node not found
- 403 Forbidden – Parameter update forbidden, e.g. because they are locked by a running GigE Vision application or there is no valid license for this component.
Referenced Data Models:
-
GET/nodes/{node}/parameters/{param}¶ Get a specific parameter of a node.
Template request
GET /api/v1/nodes/<node>/parameters/<param> HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "default": "H", "description": "Quality, i.e. H, M or L", "max": "", "min": "", "name": "quality", "type": "string", "value": "H" }
Parameters: - node (string) – name of the node (required)
- param (string) – name of the parameter (required)
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns Parameter)
- 404 Not Found – node or parameter not found
Referenced Data Models:
-
PUT/nodes/{node}/parameters/{param}¶ Update a specific parameter of a node.
Template request
PUT /api/v1/nodes/<node>/parameters/<param> HTTP/1.1 Host: <rcvisard> Accept: application/json { "name": "string", "value": {} }
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "default": "H", "description": "Quality, i.e. H, M or L", "max": "", "min": "", "name": "quality", "type": "string", "value": "M" }
Parameters: - node (string) – name of the node (required)
- param (string) – name of the parameter (required)
Request JSON Object: - parameter (Parameter) – parameter to be updated as JSON object (required)
Request Headers: - Accept – application/json
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns Parameter)
- 404 Not Found – node or parameter not found
- 403 Forbidden – Parameter update forbidden, e.g. because they are locked by a running GigE Vision application or there is no valid license for this component.
Referenced Data Models:
-
GET/nodes/{node}/services¶ Get descriptions of all services a node offers.
Template request
GET /api/v1/nodes/<node>/services HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json [ { "args": {}, "description": "Restarts the component.", "name": "restart", "response": { "accepted": "bool", "current_state": "string" } }, { "args": {}, "description": "Starts the component.", "name": "start", "response": { "accepted": "bool", "current_state": "string" } }, { "args": {}, "description": "Stops the component.", "name": "stop", "response": { "accepted": "bool", "current_state": "string" } } ]
Parameters: - node (string) – name of the node (required)
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns array of Service)
- 404 Not Found – node not found
Referenced Data Models:
-
GET/nodes/{node}/services/{service}¶ Get description of a node’s specific service.
Template request
GET /api/v1/nodes/<node>/services/<service> HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "args": { "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "slot": "int32" }, "description": "Save a pose (grid or gripper) for later calibration.", "name": "set_pose", "response": { "message": "string", "status": "int32", "success": "bool" } }
Parameters: - node (string) – name of the node (required)
- service (string) – name of the service (required)
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns Service)
- 404 Not Found – node or service not found
Referenced Data Models:
-
PUT/nodes/{node}/services/{service}¶ Call a service of a node. The required args and resulting response depend on the specific node and service.
Template request
PUT /api/v1/nodes/<node>/services/<service> HTTP/1.1 Host: <rcvisard> Accept: application/json { "args": {} }
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "name": "set_pose", "response": { "message": "Grid detected, pose stored.", "status": 1, "success": true } }
Parameters: - node (string) – name of the node (required)
- service (string) – name of the service (required)
Request JSON Object: - service args (Service) – example args (required)
Request Headers: - Accept – application/json
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns Service)
- 404 Not Found – node or service not found
- 403 Forbidden – Service call forbidden, e.g. because there is no valid license for this component.
Referenced Data Models:
-
GET/nodes/{node}/status¶ Get status of a node.
Template request
GET /api/v1/nodes/<node>/status HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "status": "running", "timestamp": 1503075030.2335997, "values": { "baseline": "0.0650542", "color": "0", "exp": "0.00426667", "focal": "0.844893", "fps": "25.1352", "gain": "12.0412", "height": "960", "temp_left": "39.6", "temp_right": "38.2", "time": "0.00406513", "width": "1280" } }
Parameters: - node (string) – name of the node (required)
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns NodeStatus)
- 404 Not Found – node not found
Referenced Data Models:
Datastreams¶
The following resources and requests allow access to and configuration of the The rc_dynamics interface data streams. These REST-API requests offer
showing available and currently running data streams, e.g.,
curl -X GET http://<rcvisard>/api/v1/datastreamsstarting a data stream to a destination, e.g.,
curl -X PUT --header 'Content-Type: application/x-www-form-urlencoded' -d 'destination=<target-ip>:<target-port>' http://<rcvisard>/api/v1/datastreams/poseand stopping data streams, e.g.,
curl -X DELETE http://<rcvisard>/api/v1/datastreams/pose?destination=<target-ip>:<target-port>
The following list includes all REST-API requests associated with data streams:
-
GET/datastreams¶ Get list of available data streams.
Template request
GET /api/v1/datastreams HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json [ { "description": "Pose of left camera at VisualOdometry rate (~10Hz)", "destinations": [ "192.168.1.13:30000" ], "name": "pose", "protobuf": "Frame", "protocol": "UDP" }, { "description": "Pose of left camera (RealTime 200Hz)", "destinations": [ "192.168.1.100:20000", "192.168.1.42:45000" ], "name": "pose_rt", "protobuf": "Frame", "protocol": "UDP" }, { "description": "Raw IMU (InertialMeasurementUnit) values (RealTime 200Hz)", "destinations": [], "name": "imu", "protobuf": "Imu", "protocol": "UDP" }, { "description": "Dynamics of sensor (pose, velocity, acceleration) (RealTime 200Hz)", "destinations": [ "192.168.1.100:20001" ], "name": "dynamics", "protobuf": "Dynamics", "protocol": "UDP" } ]
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns array of Stream)
Referenced Data Models:
-
GET/datastreams/{stream}¶ Get datastream configuration.
Template request
GET /api/v1/datastreams/<stream> HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "description": "Pose of left camera at VisualOdometry rate (~10Hz)", "destinations": [ "192.168.1.13:30000" ], "name": "pose", "protobuf": "Frame", "protocol": "UDP" }
Parameters: - stream (string) – name of the stream (required)
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns Stream)
- 404 Not Found – datastream not found
Referenced Data Models:
-
PUT/datastreams/{stream}¶ Update a datastream configuration.
Template request
PUT /api/v1/datastreams/<stream> HTTP/1.1 Host: <rcvisard> Accept: application/x-www-form-urlencoded
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "description": "Pose of left camera at VisualOdometry rate (~10Hz)", "destinations": [ "192.168.1.13:30000", "192.168.1.25:40000" ], "name": "pose", "protobuf": "Frame", "protocol": "UDP" }
Parameters: - stream (string) – name of the stream (required)
Form Parameters: - destination – destination (“IP:port”) to add (required)
Request Headers: - Accept – application/x-www-form-urlencoded
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns Stream)
- 404 Not Found – datastream not found
Referenced Data Models:
-
DELETE/datastreams/{stream}¶ Delete a destination from the datastream configuration.
Template request
DELETE /api/v1/datastreams/<stream>?destination=<destination> HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "description": "Pose of left camera at VisualOdometry rate (~10Hz)", "destinations": [], "name": "pose", "protobuf": "Frame", "protocol": "UDP" }
Parameters: - stream (string) – name of the stream (required)
Query Parameters: - destination (string) – destination IP:port to delete, if not specified all destinations are deleted (optional)
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns Stream)
- 404 Not Found – datastream not found
Referenced Data Models:
System and logs¶
The following resources and requests expose the rc_visard’s system-level API. They enable
- access to log files (system-wide or component-specific)
- access to information about the device and run-time statistics such as date, MAC address, clock-time synchronization status, and available resources;
- management of installed software licenses; and
- the rc_visard to be updated with a new firmware image.
-
GET/logs¶ Get list of available log files.
Template request
GET /api/v1/logs HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json [ { "date": 1503060035.0625782, "name": "rcsense-api.log", "size": 730 }, { "date": 1503060035.741574, "name": "stereo.log", "size": 39024 }, { "date": 1503060044.0475223, "name": "camera.log", "size": 1091 }, { "date": 1503060035.2115774, "name": "dynamics.log" } ]
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns array of LogInfo)
Referenced Data Models:
-
GET/logs/{log}¶ Get a log file. Content type of response depends on parameter ‘format’.
Template request
GET /api/v1/logs/<log>?format=<format>&limit=<limit> HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "date": 1503060035.2115774, "log": [ { "component": "rc_stereo_ins", "level": "INFO", "message": "Running rc_stereo_ins version 2.4.0", "timestamp": 1503060034.083 }, { "component": "rc_stereo_ins", "level": "INFO", "message": "Starting up communication interfaces", "timestamp": 1503060034.085 }, { "component": "rc_stereo_ins", "level": "INFO", "message": "Autostart disabled", "timestamp": 1503060034.098 }, { "component": "rc_stereo_ins", "level": "INFO", "message": "Initializing realtime communication", "timestamp": 1503060034.209 }, { "component": "rc_stereo_ins", "level": "INFO", "message": "Startet state machine in state IDLE", "timestamp": 1503060034.383 }, { "component": "rc_stereovisodo", "level": "INFO", "message": "Init stereovisodo ...", "timestamp": 1503060034.814 }, { "component": "rc_stereovisodo", "level": "INFO", "message": "rc_stereovisodo: Using standard VO", "timestamp": 1503060034.913 }, { "component": "rc_stereovisodo", "level": "INFO", "message": "rc_stereovisodo: Playback mode: false", "timestamp": 1503060035.132 }, { "component": "rc_stereovisodo", "level": "INFO", "message": "rc_stereovisodo: Ready", "timestamp": 1503060035.212 } ], "name": "dynamics.log", "size": 695 }
Parameters: - log (string) – name of the log file (required)
Query Parameters: - format (string) – return log as JSON or raw (one of
json,raw; default:json) (optional) - limit (integer) – limit to last x lines in JSON format (default:
100) (optional)
Response Headers: - Content-Type – text/plain application/json
Status Codes: - 200 OK – successful operation (returns Log)
- 404 Not Found – log not found
Referenced Data Models:
-
GET/system¶ Get system information on sensor.
Template request
GET /api/v1/system HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "firmware": { "active_image": { "image_version": "rc_visard_v1.1.0" }, "fallback_booted": true, "inactive_image": { "image_version": "rc_visard_v1.0.0" }, "next_boot_image": "active_image" }, "hostname": "rc-visard-02873515", "link_speed": 1000, "mac": "00:14:2D:2B:D8:AB", "ntp_status": { "accuracy": "48 ms", "synchronized": true }, "ptp_status": { "master_ip": "", "offset": 0, "offset_dev": 0, "offset_mean": 0, "state": "off" }, "ready": true, "serial": "02873515", "time": 1504080462.641875, "uptime": 65457.42 }
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns SysInfo)
Referenced Data Models:
-
GET/system/license¶ Get information about licenses installed on sensor.
Template request
GET /api/v1/system/license HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "components": { "calibration": true, "fusion": true, "hand_eye_calibration": true, "rectification": true, "self_calibration": true, "slam": false, "stereo": true, "svo": true }, "valid": true }
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns LicenseInfo)
Referenced Data Models:
-
POST/system/license¶ Update license on sensor with a license file.
Template request
POST /api/v1/system/license HTTP/1.1 Host: <rcvisard> Accept: multipart/form-data
Form Parameters: - file – license file (required)
Request Headers: - Accept – multipart/form-data
Status Codes: - 200 OK – successful operation
- 400 Bad Request – not a valid license
-
PUT/system/reboot¶ Reboot the sensor.
Template request
PUT /api/v1/system/reboot HTTP/1.1 Host: <rcvisard>
Status Codes: - 200 OK – successful operation
-
GET/system/rollback¶ Get information about currently active and inactive firmware/system images on sensor.
Template request
GET /api/v1/system/rollback HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "active_image": { "image_version": "rc_visard_v1.1.0" }, "fallback_booted": false, "inactive_image": { "image_version": "rc_visard_v1.0.0" }, "next_boot_image": "active_image" }
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns FirmwareInfo)
Referenced Data Models:
-
PUT/system/rollback¶ Rollback to previous firmware version (inactive system image).
Template request
PUT /api/v1/system/rollback HTTP/1.1 Host: <rcvisard>
Status Codes: - 200 OK – successful operation
- 500 Internal Server Error – internal error
- 400 Bad Request – already set to use inactive partition on next boot
-
GET/system/update¶ Get information about currently active and inactive firmware/system images on sensor.
Template request
GET /api/v1/system/update HTTP/1.1 Host: <rcvisard>
Sample response
HTTP/1.1 200 OK Content-Type: application/json { "active_image": { "image_version": "rc_visard_v1.1.0" }, "fallback_booted": false, "inactive_image": { "image_version": "rc_visard_v1.0.0" }, "next_boot_image": "active_image" }
Response Headers: - Content-Type – application/json
Status Codes: - 200 OK – successful operation (returns FirmwareInfo)
Referenced Data Models:
-
POST/system/update¶ Update firmware/system image with a mender artifact. Reboot is required afterwards in order to activate updated firmware version.
Template request
POST /api/v1/system/update HTTP/1.1 Host: <rcvisard> Accept: multipart/form-data
Form Parameters: - file – mender artifact file (required)
Request Headers: - Accept – multipart/form-data
Status Codes: - 200 OK – successful operation
- 400 Bad Request – client error, e.g. no valid mender artifact
Data type definitions¶
The REST-API defines the following data models, which are used to access or modify the available resources either as required attributes/parameters of the requests or as return types.
- FirmwareInfo:
Information about currently active and inactive firmware images, and what image is/will be booted.
An object of type FirmwareInfo has the following properties:
- active_image (ImageInfo) - see description of ImageInfo
- fallback_booted (boolean) - true if desired image could not be booted and fallback boot to the previous image occured
- inactive_image (ImageInfo) - see description of ImageInfo
- next_boot_image (string) - firmware image that will be booted next time (one of
active_image,inactive_image)
Template object
{ "active_image": { "image_version": "string" }, "fallback_booted": false, "inactive_image": { "image_version": "string" }, "next_boot_image": "string" }
FirmwareInfo objects are nested in SysInfo, and are used in the following requests:
- ImageInfo:
Information about specific firmware image.
An object of type ImageInfo has the following properties:
- image_version (string) - image version
Template object
{ "image_version": "string" }
ImageInfo objects are nested in FirmwareInfo.
- LicenseComponents:
List of the licensing status of the individual software components. The respective flag is true if the component is unlocked with the currently applied software license.
An object of type LicenseComponents has the following properties:
- calibration (boolean) - camera calibration component
- fusion (boolean) - stereo ins/fusion components
- hand_eye_calibration (boolean) - hand-eye calibration component
- rectification (boolean) - image rectification component
- self_calibration (boolean) - camera self-calibration component
- slam (boolean) - SLAM component
- stereo (boolean) - stereo matching component
- svo (boolean) - visual odometry component
Template object
{ "calibration": false, "fusion": false, "hand_eye_calibration": false, "rectification": false, "self_calibration": false, "slam": false, "stereo": false, "svo": false }
LicenseComponents objects are nested in LicenseInfo.
- LicenseInfo:
Information about the currently applied software license on the sensor.
An object of type LicenseInfo has the following properties:
- components (LicenseComponents) - see description of LicenseComponents
- valid (boolean) - indicates whether the license is valid or not
Template object
{ "components": { "calibration": false, "fusion": false, "hand_eye_calibration": false, "rectification": false, "self_calibration": false, "slam": false, "stereo": false, "svo": false }, "valid": false }
LicenseInfo objects are used in the following requests:
- Log:
Content of a specific log file represented in JSON format.
An object of type Log has the following properties:
- date (float) - UNIX time when log was last modified
- log (array of LogEntry) - the actual log entries
- name (string) - mame of log file
- size (integer) - size of log file in bytes
Template object
{ "date": 0, "log": [ { "component": "string", "level": "string", "message": "string", "timestamp": 0 }, { "component": "string", "level": "string", "message": "string", "timestamp": 0 } ], "name": "string", "size": 0 }
Log objects are used in the following requests:
- LogEntry:
Representation of a single log entry in a log file.
An object of type LogEntry has the following properties:
- component (string) - component name that created this entry
- level (string) - log level (one of
DEBUG,INFO,WARN,ERROR,FATAL) - message (string) - actual log message
- timestamp (float) - Unix time of log entry
Template object
{ "component": "string", "level": "string", "message": "string", "timestamp": 0 }
LogEntry objects are nested in Log.
- LogInfo:
Information about a specific log file.
An object of type LogInfo has the following properties:
- date (float) - UNIX time when log was last modified
- name (string) - name of log file
- size (integer) - size of log file in bytes
Template object
{ "date": 0, "name": "string", "size": 0 }
LogInfo objects are used in the following requests:
- NodeInfo:
Description of a computational node running on sensor.
An object of type NodeInfo has the following properties:
- name (string) - name of the node
- parameters (array of string) - list of the node’s run-time parameters
- services (array of string) - list of the services this node offers
- status (string) - status of the node (one of
unknown,down,stale,running)
Template object
{ "name": "string", "parameters": [ "string", "string" ], "services": [ "string", "string" ], "status": "string" }
NodeInfo objects are used in the following requests:
- NodeStatus:
Detailed current status of the node including run-time statistics.
An object of type NodeStatus has the following properties:
- status (string) - status of the node (one of
unknown,down,stale,running) - timestamp (float) - Unix time when values were last updated
- values (object) - dictionary with current status/statistics of the node
Template object
{ "status": "string", "timestamp": 0, "values": {} }
NodeStatus objects are used in the following requests:
- status (string) - status of the node (one of
- NtpStatus:
Status of the NTP time sync.
An object of type NtpStatus has the following properties:
- accuracy (string) - time sync accuracy reported by NTP
- synchronized (boolean) - synchronized with NTP server
Template object
{ "accuracy": "string", "synchronized": false }
NtpStatus objects are nested in SysInfo.
- Parameter:
Representation of a node’s run-time parameter. The parameter’s ‘value’ type (and hence the types of the ‘min’, ‘max’ and ‘default’ fields) can be inferred from the ‘type’ field and might be one of the built-in primitive data types.
An object of type Parameter has the following properties:
- default (type not defined) - the parameter’s default value
- description (string) - description of the parameter
- max (type not defined) - maximum value this parameter can be assigned to
- min (type not defined) - minimum value this parameter can be assigned to
- name (string) - name of the parameter
- type (string) - the parameter’s primitive type represented as string (one of
bool,int8,uint8,int16,uint16,int32,uint32,int64,uint64,float32,float64,string) - value (type not defined) - the parameter’s current value
Template object
{ "default": {}, "description": "string", "max": {}, "min": {}, "name": "string", "type": "string", "value": {} }
Parameter objects are used in the following requests:
- PtpStatus:
Status of the IEEE1588 (PTP) time sync.
An object of type PtpStatus has the following properties:
- master_ip (string) - IP of the master clock
- offset (float) - time offset in seconds to the master
- offset_dev (float) - standard deviation of time offset in seconds to the master
- offset_mean (float) - mean time offset in seconds to the master
- state (string) - state of PTP (one of
off,unknown,INITIALIZING,FAULTY,DISABLED,LISTENING,PASSIVE,UNCALIBRATED,SLAVE)
Template object
{ "master_ip": "string", "offset": 0, "offset_dev": 0, "offset_mean": 0, "state": "string" }
PtpStatus objects are nested in SysInfo.
- Service:
Representation of a service that a node offers.
An object of type Service has the following properties:
- args (ServiceArgs) - see description of ServiceArgs
- description (string) - short description of this service
- name (string) - name of the service
- response (ServiceResponse) - see description of ServiceResponse
Template object
{ "args": {}, "description": "string", "name": "string", "response": {} }
Service objects are used in the following requests:
- ServiceArgs:
Arguments required to call a service with. The general representation of these arguments is a (nested) dictionary. The specific content of this dictionary depends on the respective node and service call.
ServiceArgs objects are nested in Service.
- ServiceResponse:
The response returned by the service call. The general representation of this response is a (nested) dictionary. The specific content of this dictionary depends on the respective node and service call.
ServiceResponse objects are nested in Service.
- Stream:
Represention of a data stream offered by the rc_dynamics interface.
An object of type Stream has the following properties:
- destinations (array of StreamDestination) - list of destinations this data is currently streamed to
- name (string) - the data stream’s name specifying which rc_dynamics data is streamed
- type (StreamType) - see description of StreamType
Template object
{ "destinations": [ "string", "string" ], "name": "string", "type": { "protobuf": "string", "protocol": "string" } }
Stream objects are used in the following requests:
- StreamDestination:
A destination of an rc_dynamics data stream represented as string such as ‘IP:port’
An object of type StreamDestination is of primitive type string.
StreamDestination objects are nested in Stream.
- StreamType:
Description of a data stream’s protocol.
An object of type StreamType has the following properties:
- protobuf (string) - type of data-serialization, i.e. name of protobuf message definition
- protocol (string) - network protocol of the stream [UDP]
Template object
{ "protobuf": "string", "protocol": "string" }
StreamType objects are nested in Stream.
- SysInfo:
System information about the sensor.
An object of type SysInfo has the following properties:
- firmware (FirmwareInfo) - see description of FirmwareInfo
- hostname (string) - Hostname
- link_speed (integer) - Ethernet link speed in Mbps
- mac (string) - MAC address
- ntp_status (NtpStatus) - see description of NtpStatus
- ptp_status (PtpStatus) - see description of PtpStatus
- ready (boolean) - system is fully booted and ready
- serial (string) - sensor serial number
- time (float) - system time as Unix timestamp
- uptime (float) - system uptime in seconds
Template object
{ "firmware": { "active_image": { "image_version": "string" }, "fallback_booted": false, "inactive_image": { "image_version": "string" }, "next_boot_image": "string" }, "hostname": "string", "link_speed": 0, "mac": "string", "ntp_status": { "accuracy": "string", "synchronized": false }, "ptp_status": { "master_ip": "string", "offset": 0, "offset_dev": 0, "offset_mean": 0, "state": "string" }, "ready": false, "serial": "string", "time": 0, "uptime": 0 }
SysInfo objects are used in the following requests:
Swagger UI¶
The rc_visard’s Swagger UI allows developers to easily
visualize and interact with the REST-API, e.g., for development and testing. Accessing
http://<rcvisard>/api/ or http://<rcvisard>/api/swagger
(the former will automatically be redirected to the latter) opens a visualization
of the rc_visard’s general API structure including all
available resources and requests
and offers a simple user interface for exploring all of its features.
Note
Users must be aware that, although the rc_visard’s Swagger UI is
designed to explore and test the REST-API, it is a fully
functional interface.
That is, any issued requests are actually
processed and particularly PUT, POST, and DELETE
requests might change the overall status and/or behavior of the
device.
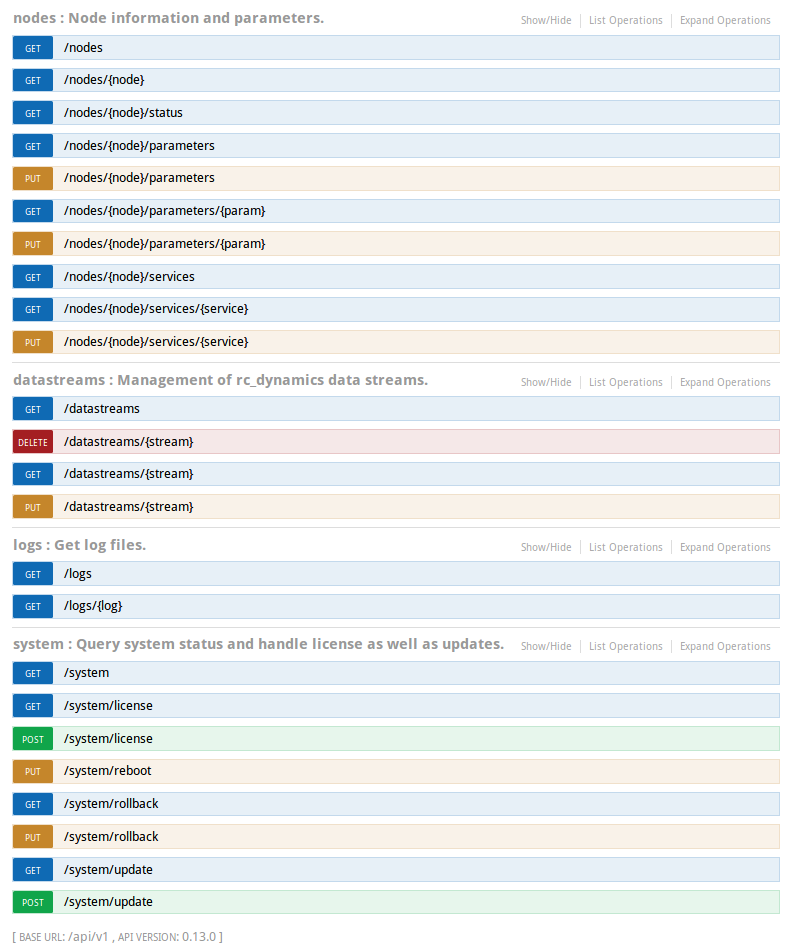
Fig. 42 Initial view of the rc_visard’s Swagger UI with its resources and requests
grouped into nodes, datastreams, logs, and system
Using this interface, available resources and requests can be explored by
clicking on them to uncollapse or recollapse them.
The following figure shows an example of how to get a node’s current status
by filling in the necessary parameter (node name) and clicking the
Try it out! button. This action results in the Swagger UI showing,
amongst others, the actual curl command that was executed when
issuing the request as well as the response body showing the current status
of the requested node in a JSON-formatted string.
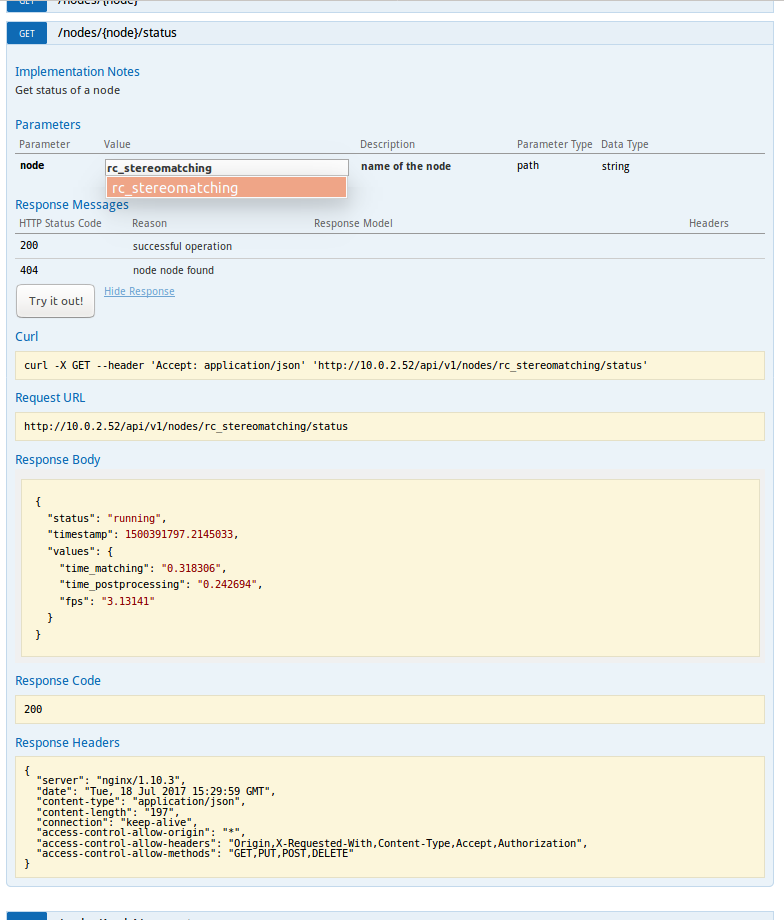
Fig. 43 Result of requesting the rc_stereomatching node’s status
Some actions, such as setting parameters or calling services, require more
complex parameters to an HTTP request. The Swagger UI allows developers to
explore the attributes required for these actions during run-time, as shown in
the next example. In the figure below, the attributes required for the
the rc_hand_eye_calibration node’s set_pose service are explored by
performing a GET request on this resource. The response features a full
description of the service offered, including all required arguments with
their names and types as a JSON-formatted string.
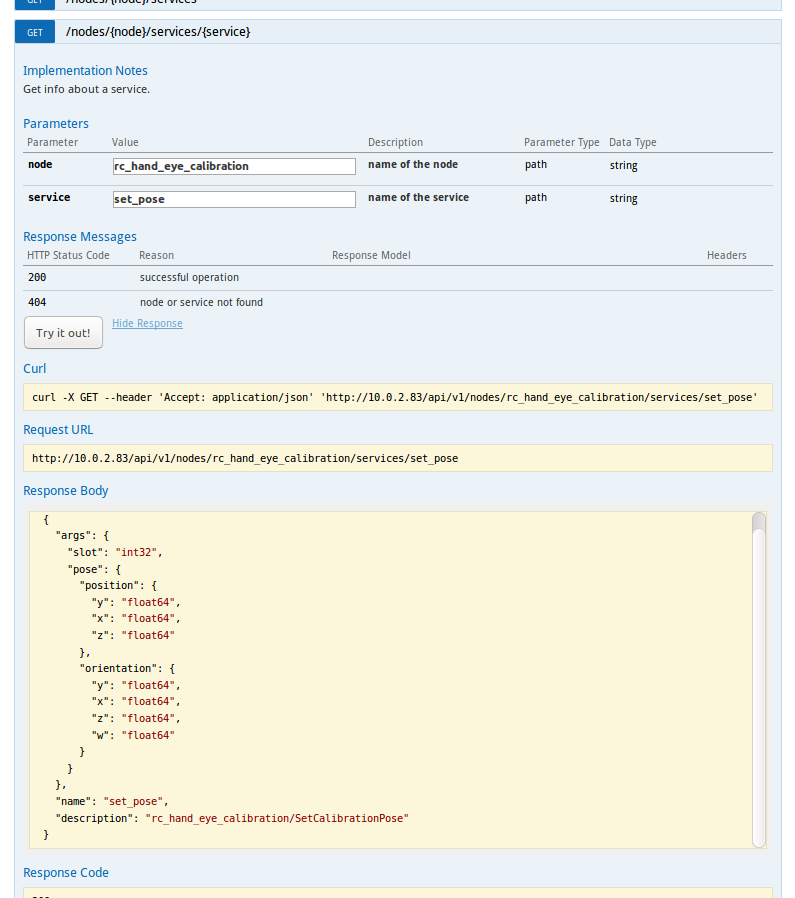
Fig. 44 The result of the GET request on the set_pose service shows the
required arguments for this service call.
Users can easily use this preformatted JSON string as a template for the service arguments to actually call the service:
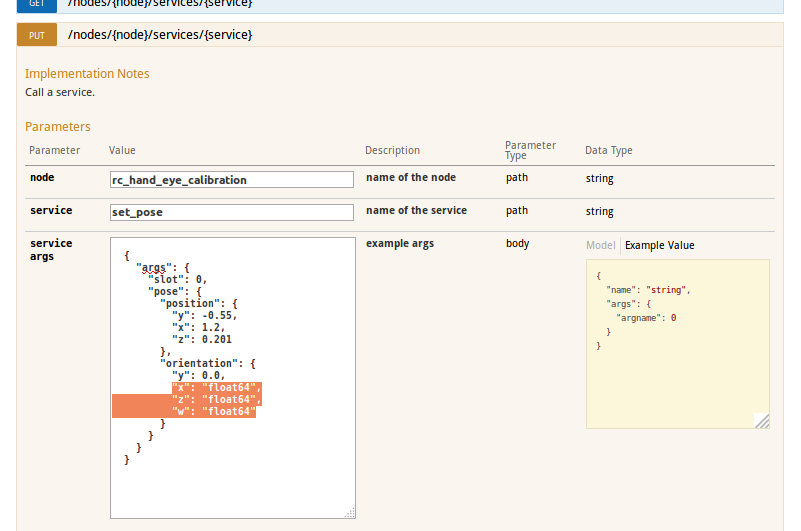
Fig. 45 Filling in the arguments of the set_pose service request