SLAM (optional)¶
Das SLAM-Modul ist Teil des Dynamik-Moduls und stellt genauere Posenschätzungen als das Stereo-INS-Modul bereit. Wenn sich der rc_visard bewegt, summieren sich mit der Zeit die bei der Posenschätzung auftretenden Fehler. Das SLAM-Modul kann diese Fehler korrigieren, indem es bereits besuchte Orte wiedererkennt.
Das Akronym SLAM steht für simultane Lokalisierung und Kartenerstellung (simultaneous localization and mapping). Das SLAM-Modul erstellt eine Karte aus den für die visuelle Odometrie genutzten Bildmerkmalen. Die Karte wird später verwendet, um kumulierte Posenfehler zu korrigieren. Am ehesten lässt sich dies in Anwendungen beobachten, bei denen der Roboter, nachdem er eine lange Strecke zurückgelegt hat, an einen besuchten Ort zurückkehrt (dies wird auch „Schleifenschluss“ oder „Loop Closure“ genannt). In diesem Fall kann der Roboter Bildmerkmale, die bereits in seiner Karte abgespeichert sind, wiedererkennen und seine Posenschätzung auf dieser Grundlage korrigieren.
Kommt es zu einem Schleifenschluss, wird nicht nur die aktuelle, sondern auch die bisherige Posenschätzung (Trajektorie des rc_visard) korrigiert. Die kontinuierliche Korrektur der Trajektorie sorgt dafür, dass die Karte immer mehr an Genauigkeit gewinnt. Die Genauigkeit der Trajektorie ist auch wichtig, wenn diese zum Aufbau eines integrierten Weltmodells verwendet wird, indem beispielsweise die ermittelten 3D-Punktwolken in ein gemeinsames Koordinatensystem projiziert werden (siehe Berechnung von Tiefenbildern und Punktwolken). Zu diesem Zweck kann die gesamte Trajektorie des rc_visard beim SLAM-Modul abgefragt werden.
Das SLAM-Modul ist optional für den rc_visard erhältlich und läuft intern auf dem Sensor. Sobald eine SLAM-Lizenz auf dem rc_visard hinterlegt wird, erscheint das SLAM-Modul in der Registerkarte Überblick der Web GUI als Verfügbar und SLAM ist auf der Registerkarte System im Bereich Lizenz aktiviert.
Verwendung¶
Das SLAM-Modul kann jederzeit entweder über das rc_dynamics Interface (siehe Dokumentation der zugehörigen Services) oder über die Dynamik Registerkarte der Web GUI eingeschaltet werden.
Die Posenschätzung des SLAM-Moduls wird durch die aktuelle Schätzung des Stereo-INS-Moduls initialisiert. Der Ursprung der Posenschätzung befindet sich also an dem Punkt, an dem das Stereo-INS-Modul gestartet wurde.
Da das SLAM-Modul auf den Bewegungsschätzungen der Stereo-INS aufbaut, wird das Stereo-INS-Modul automatisch gestartet, sobald SLAM gestartet wird, sollte es nicht bereits laufen.
Wenn das SLAM-Modul läuft sind die korrigierten Posenschätzungen über die Datenströme pose, pose_rt, und dynamics des Sensordynamik-Moduls verfügbar.
Die komplette Trajektorie kann durch den get_trajectory Service abgefragt werden, siehe Services für weitere Details.
Speicherbeschränkungen¶
Das SLAM-Modul muss, im Gegensatz zu anderen Softwarekomponenten auf dem rc_visard, Daten über die Zeit akkumulieren, z.B. Bewegungsmessungen und Bildmerkmale. Weiterhin benötigt die Optimierung der Trajektorie beträchtliche Speichermengen, besonders wenn große Schleifen geschlossen werden müssen. Deswegen steigen die Speicheranforderungen des SLAM-Moduls mit der Zeit.
Durch die Speicherbeschränkungen der Hardware muss das SLAM-Modul seinen Speicherbedarf reduzieren, wenn es kontinuierlich läuft. Wenn der verfügbare Speicher knapp wird, fixiert das SLAM-Modul Teile seiner Trajektorie. Das heißt, diese Teile werden nicht weiter optimiert. Die letzten 10 Minuten der aktuellen Trajektorie sind von der Fixierung jedoch immer ausgenommen.
Wenn trotz der oben genannten Maßnahmen der Speicher knapp wird, stehen zwei Optionen zur Verfügung. Als erste Option kann das SLAM-Modul in den HALTED-Zustand gehen, in dem es keine weiteren Verarbeitungsschritte durchführt, aber die Trajektorie weiterhin verfügbar ist (bis zu dem Zeitpunkt, in dem das Modul in den HALTED-Zustand gewechselt ist). Dies ist das Standardverhalten.
Die zweite Option ist, dass das SLAM-Modul weiterläuft, bis der Speicher aufgebraucht ist. In diesem Fall wird das SLAM-Modul neu gestartet. Wenn der autorecovery Parameter auf true gesetzt ist, wird das SLAM-Modul seine letzte Position wieder herstellen und die Kartierung fortsetzen. Andernfalls wird das Modul in den FATAL-Zustand wechseln und muss über das rc_dynamics Interface neugestartet werden (siehe Services).
Die Laufzeit bis zum Erreichen des Speicherlimits hängt stark von der Trajektorie des Sensors ab.
Parameter¶
Das SLAM-Modul wird in der REST-API als rc_slam bezeichnet. Der Benutzer kann die SLAM-Parameter über die REST-API-Schnittstelle setzen.
Übersicht über die Parameter¶
Dieses Softwaremodul bietet folgende Laufzeitparameter.
| Name | Typ | Min. | Max. | Default | Beschreibung |
|---|---|---|---|---|---|
autorecovery |
bool | False | True | True | Stellt korrigierte Position im Fall von fatalen Fehlern wieder her und startet die Kartierung neu. |
halt_on_low_memory |
bool | False | True | True | Gehe in den HALTED-Zustand, wenn der Speicher knapp wird. |
Dieses Modul meldet folgende Statuswerte:
| Name | Beschreibung |
|---|---|
state |
Der aktuelle Zustand des SLAM-Moduls |
trajectory_poses |
Anzahl der Posen in der geschätzten Trajektorie |
Der Parameter state kann folgende Werte annehmen:
| Zustandsname | Beschreibung |
|---|---|
| IDLE | Das Modul ist bereit, aber inaktiv. Keine Trajektorie ist verfügbar. |
| WAITING_FOR_DATA | Das Modul wurde gestartet, aber wartet auf Daten vom Stereo-INS-Modul oder von der VO. |
| RUNNING | Das Modul läuft. |
| HALTED | Das Modul wurde gestoppt. Die Trajektorie ist noch verfügbar. Es werden keine neuen Informationen verarbeitet. |
| RESETTING | Das Modul wird gestoppt und die internen Daten werden gelöscht. |
| RESTARTING | Das Modul wird neu gestartet. |
| FATAL | Ein fataler Fehler ist aufgetreten. |
Services¶
Das SLAM-Modul wird hauptsächlich über das rc_dynamics Interface angesprochen. Zusätzlich stehen die folgenden Services zur Verfügung:
resetLöscht den internen Zustand des SLAM-Moduls. Dieser Service sollte genutzt werden, wenn das SLAM-Modul über das rc_dynamics Interface (siehe Services) gestoppt wurde. Das SLAM-Modul behält die Schätzung der kompletten Trajektorie, auch wenn es gestoppt ist. Dieser Service löscht diese Trajektorie und gibt den zugehörigen Speicher frei. Der zurückgegebene Zustand ist RESETTING.
Für diesen Service sind keine Argumente nötig.
Dieser Service gibt folgende Rückgabe:
{ "accepted": "bool", "current_state": "string" }
get_trajectory- Mit diesem Service kann die Trajektorie abgefragt werden. Die Service-Argumente
start_timeundend_timeermöglichen die Auswahl eines Trajektorienabschnitts. Sie sind optional und können weggelassen oder mit Null-Werten gefüllt sein. In diesem Fall beginnt der Ausschnitt am Trajektorienanfang bzw. schließt mit dem Trajektorienende. Im anderen Fall stellen sie entweder einen absoluten Zeitstempel dar oder sind relativ zur Trajektorie zu interpretieren (start_time_relativeundend_time_relativeFlags). Ist eine relative Zeitangabe angegeben, entscheidet das Vorzeichen der entsprechenden Werte, auf welchen Zeitpunkt der Trajektorie sie sich bezieht: Positive Werte werden als Offset auf den Zeitpunkt des Trajektorienstarts interpretiert, negative Werte auf den Zeitpunkt des Trajektorienendes. Das folgende Diagramm zeigt drei Beispielparametrisierungen des Services mit relativen Zeitangaben.
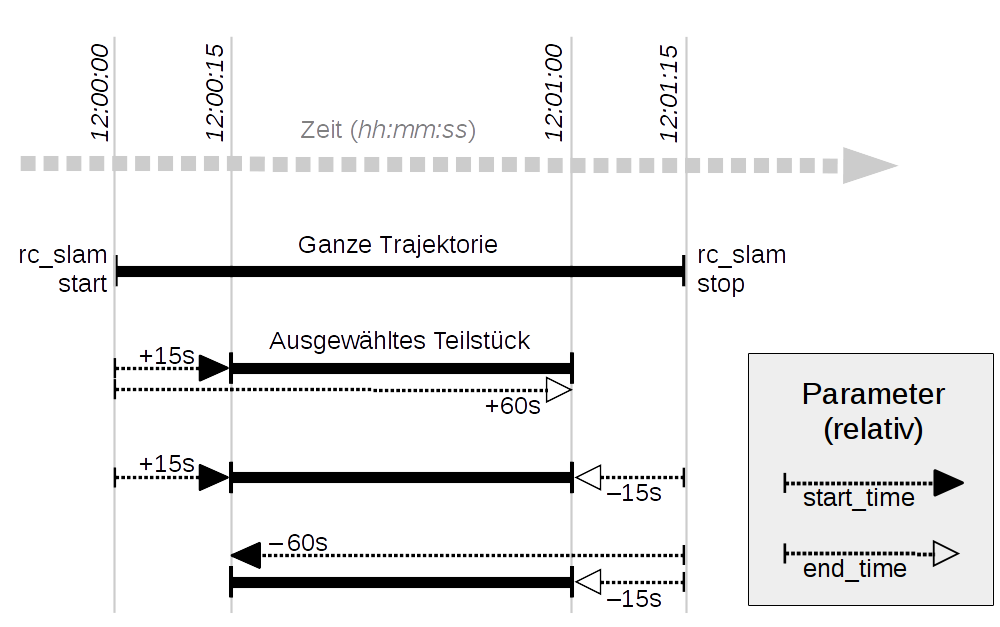
Abb. 25 Beispielhafte Kombinationen positiver und negativer relativer Zeitangaben. Alle gezeigten Kombinationen resultieren im gleichen Teilstück.
Hinweis
Bei relativen Zeitangaben wird eine start_time von Null als der Anfang der Trajektorie interpretiert, eine end_time von Null wird hingegen als das Ende der Trajektorie gewertet.
Dieser Service benötigt folgende Argumente:
{
"end_time": {
"nsec": "int32",
"sec": "int32"
},
"end_time_relative": "bool",
"start_time": {
"nsec": "int32",
"sec": "int32"
},
"start_time_relative": "bool"
}
Dieser Service gibt folgende Rückgabe:
{
"trajectory": {
"name": "string",
"parent": "string",
"poses": [
{
"pose": {
"orientation": {
"w": "float64",
"x": "float64",
"y": "float64",
"z": "float64"
},
"position": {
"x": "float64",
"y": "float64",
"z": "float64"
}
},
"timestamp": {
"nsec": "int32",
"sec": "int32"
}
}
],
"producer": "string",
"timestamp": {
"nsec": "int32",
"sec": "int32"
}
}
}